
簡介
姿態與航向控制系統以全姿態組合陀螺作為飛機上的中心陀螺儀,通常由磁感測器、全姿態組合陀螺、放大器、指示器、控制盒和操縱台等組成。其主要的部件是全姿態陀螺,它可實時測量、顯示飛機的飛行航向和姿態等導航信息。即確定飛行中的機體坐標相對與地面的位置及機頭的方向等信息。
工作原理
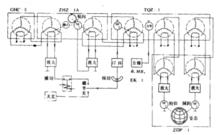 圖1:HZX-2姿態與航向系統傳動圖
圖1:HZX-2姿態與航向系統傳動圖以國內生產的HZX-2T姿態與航向控制系統為例說明其工作原理。
HZX-2T由GHC-5磁感應感測器、TQZ-1全姿態組合陀螺、ZHZ-4A綜合航向指示器、FZ-3綜合放大器、EK一4控制盒、EJ-8繼電器盒、TQZ-1全姿態指示器及ZDP-1地平指示器組成。
該系統能顯示和輸出磁航向、陀螺航向、電台相對方位角、電台磁方位角、飛機俯仰角、傾斜角信號,是專供機載測試用的系統。
該系統傳動關係如右圖1所示。圖中未畫出EJ-8繼電器盒,但畫出了EK-4控制盒上的方位修正信號及狀態選擇開關和放大器。橫向切斷由XJS-1控制,縱向切斷和17°環設在組合陀螺中,陀螺的結構如右圖2所示。
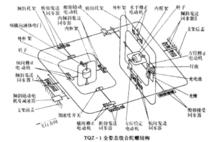 圖2:TQZ-1全姿態組合陀螺結構
圖2:TQZ-1全姿態組合陀螺結構該組合陀螺就相當於垂直陀螺的傾斜托架上加裝了一個帶俯仰托架的航向陀螺。由於兩個陀螺被各自的托架穩定,保持垂直陀螺三軸始終垂直,轉子軸跟蹤地垂線;保持航向陀螺三軸始終垂直,轉子軸跟蹤子午線。這樣,陀螺能在任何飛行狀態下,輸出飛機的俯仰角、傾斜角和航向角信號。
垂直陀螺復現地垂線,敏感飛機的傾斜角、俯仰角信號,通過遠距傳輸裝置在指示器上顯示飛機俯仰、傾斜角度而組成姿態系統。
當飛機傾斜時,殼體與傾斜托架及垂直陀螺外框軸一起傾斜、外框軸上的定子相對於垂直陀螺外框軸上的轉子轉動而輸出內傾斜信號給傾斜伺服電機,使傾斜托架帶動垂直陀螺的外框軸及航向陀螺俯仰托架轉動。當轉動到兩個陀螺的三軸相互垂直時,垂直陀螺的轉子軸與航向陀螺的外框軸在飛機橫軸的鉛垂面內與地垂線平行,在這個過程中,托架軸上的定子相對於殼體上的轉子轉動而輸出傾斜角信號給指示器和測試系統;
當飛機俯仰時,傾斜隨動上的定子隨殼體繞垂直陀螺外框軸上的轉子轉動而輸出俯仰角信號:一方面給指示器和測試系統;另一方面驅動航向陀螺的俯仰托架,使垂直陀螺的轉子軸與航向陀螺外框軸在飛機縱軸的鉛垂面內與地垂線平行。當飛機航向改變時,俯仰托架上定子繞航向陀螺外框軸上的轉子轉動而輸出陀螺航向信號給指示器和測試系統。
為克服地球自轉造成的緯度誤差及陀螺不平衡量帶來的機械誤差,通過操縱台不斷給航向陀螺提供方位修正信號。飛機縱橫向加速時,都將產生虛假地垂線,為避免垂直陀螺去跟蹤虛假地垂線,帶來加速度誤差,設定了縱橫向切斷裝置。當飛機俯仰角大於17°時,因磁感測器產生錯誤的航向信號,因此,在俯仰托架軸上安裝了17°環,當飛機俯仰角大於17°時,就切斷磁航向修正信號。當飛機俯仰角大於90°時,航向及傾斜都出現了180°誤差,因此,在俯仰托架軸上安裝了90°換向環,當俯仰角達到90°時,使傾斜托架迅速轉過180°,以適應飛機倒飛狀況。
主要組成
全姿態陀螺儀
全姿態陀螺儀由裝在隨動環內的航向陀螺和垂直陀螺組成。航向陀螺由磁感應感測器或天文羅盤修正,輸出航向參考信號;垂直陀螺輸出俯仰和傾側姿態參考信號。飛機作機動飛行時,為保證全姿態正常工作垂直陀螺輸出姿態角信息,通過伺服系統帶動相應的隨動環。因此,它既能使航向陀螺的測量軸始終保持在當地垂線方向上,從而消除其傾側支架誤差,又能使垂直陀螺的外環軸與自轉軸始終保持正交,從而使垂直陀螺正常工作。
為保證全姿態陀螺儀的測量精度,航向陀螺有保持自轉軸水平(與測量軸正交)的水平修正裝置和按緯度補償地球自轉影響和其他因素引起方位漂移的方位修正裝置。垂直陀螺有保持自轉軸與當地垂線一致的垂直修正裝置。此裝置受盤旋切斷開關的控制避免盤旋誤差。為了降低支架軸承摩擦力矩對方位測量精度的影響,可以採取專門的技術措施(如旋轉軸承等)。
全姿態指示器
航向姿態系統的指示裝置綜合顯示飛機的航向角、俯仰角和傾側角,顯示部分主要由球形刻度盤、小飛機標誌和刻度指標等組成。球形刻度盤上有經線和緯線。經線上有航向刻度讀數,緯線上有俯仰刻度。刻度盤上半球塗成淺色,以示天空,下半球塗成深色,以示地面。上下半球之間的分界線是人工地平線。小飛機標誌固定在表殼上。
全姿態陀螺儀輸出的航向角、俯仰角和傾側角信號通過全姿態指示器內的三套交流伺服系統使球形刻度盤和傾側指標轉動。飛機全姿態以小飛機標誌的中點(A點)作為判讀點,由相對於刻度盤經線的位置讀取航向角,相對於刻度盤緯線的位置讀取俯仰角;根據傾側指標相對於殼體面板上傾側刻度的位置讀取傾側角。此外,指示器還接受速率陀螺輸出的飛機轉彎速率信號,根據轉彎指標相對於轉彎刻度的位置判讀飛機有無轉彎、轉彎方向和速率大小,並根據側滑儀判讀飛機有無側滑。這個部分的工作原理與轉彎傾斜儀相同。用面板上的俯仰調整旋鈕可以適當調整球形刻度盤相對小飛機標誌的俯仰角度。
航向姿態系統的航向角信號由全姿態陀螺儀中航向陀螺測量軸上的同步器提供,其精度約 1.5°。俯仰角信號由全姿態陀螺儀的垂直陀螺與傾側隨動環間的同步器提供,傾側角信號由傾側隨動環與殼體之間的同步器提供。姿態角的精度在水平飛行時約為1°,機動飛行時約為2.5°。
