
簡介
 飛機姿態角
飛機姿態角 飛機姿態角
飛機姿態角 飛機姿態角
飛機姿態角 飛機姿態角 飛機姿態角 飛機姿態角
飛機姿態角 飛機姿態角 飛機姿態角機體坐標系 ,對於飛機而言,如左圖所示, 軸沿飛機橫軸指右, 軸沿飛機縱軸指前, 軸沿飛機豎軸並與 、 軸構成右手直角坐標系 。
 地理坐標系
地理坐標系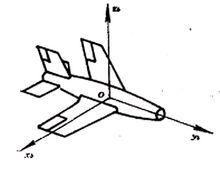 機體坐標系
機體坐標系 飛機姿態角
飛機姿態角 飛機姿態角
飛機姿態角 飛機姿態角
飛機姿態角 飛機姿態角 飛機姿態角 飛機姿態角
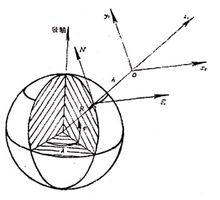
飛機姿態角 飛機姿態角 飛機姿態角地理坐標系 如右圖所示,其原點位於運載體所在的點, 軸沿當地緯線指東, 軸沿當地子午線指北, 軸沿當地地理垂線指上並與 、 軸構成右手直角坐標系 。
 飛機姿態角 飛機姿態角
飛機姿態角 飛機姿態角 飛機姿態角
飛機姿態角 飛機姿態角 飛機姿態角 飛機姿態角
飛機姿態角 飛機姿態角 飛機姿態角 飛機姿態角 飛機姿態角 飛機姿態角
飛機姿態角 飛機姿態角 飛機姿態角飛機姿態角是由機體坐標系與地理坐標系之間的關係確定的,由航向角、俯仰角和橫滾角三個歐拉角組成。其中,俯仰角 為機體 軸與地平面(平面 )間的夾角,以飛機抬頭為正;航向角 為機體 軸在地平面上的投影與 軸間的夾角,以機頭右偏航為正;橫滾角 為機體 軸與包含機體 軸的鉛垂面間的夾角,以飛機向右傾斜為正。
飛機姿態角 飛機姿態角 飛機姿態角
飛機姿態角 飛機姿態角
飛機姿態角 飛機姿態角 飛機姿態角 飛機姿態角 飛機姿態角
飛機姿態角 飛機姿態角 飛機姿態角 飛機姿態角按照轉動順序來定義,如飛機姿態角圖冊中的圖所示,假設初始時機體坐標系 與地理坐標系 對應各軸重合。機體坐標系按圖中所示的三個角速度 、 和 依次相對地理坐標系轉動,這樣所得的三個角度 、 和 就分別是飛機的航向角、俯仰角和橫滾角。
作用
飛機姿態角 飛機姿態角 飛機姿態角 飛機姿態角 飛機姿態角 飛機姿態角通過飛機姿態角可以得到飛機所在的機體坐標系與地理坐標系間的坐標轉換矩陣,通常機體坐標系與地理坐標系間的轉動關係按航向角、俯仰角和橫滾角的順序進行,即先繞 軸轉過 (航向角),再在此基礎上繞 軸轉過 (俯仰角),最後在前兩次旋轉的基礎上繞 軸轉過 (橫滾角)。
 飛機姿態角
飛機姿態角由此得到地理坐標系(t系)和機體坐標系(b系)間的坐標轉換矩陣 如下 :
 飛機姿態角
飛機姿態角 飛機姿態角
飛機姿態角飛機姿態角控制
 飛機姿態角
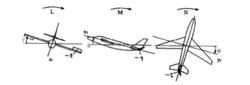
飛機姿態角飛機主要藉助機翼和平尾上的舵面來實施操縱。通過副翼、升降舵和方向舵(ξ,η,ζ),可以產生繞縱軸、橫軸和豎軸(x,y,z)的力矩(L,M,N),藉助這些力矩,就可以改變飛機姿態角( ) 。
 飛機姿態角 飛機姿態角
飛機姿態角 飛機姿態角圖中的分別為滾轉角、俯仰角和航向角。
