
概述
電子指南針是現代的一種重要導航工具,可套用在多種場合中。電子指南針內部結構固定,沒有移動部分,可以簡單地和其它電子系統接口,因此可代替舊的磁指南針。並以精度高、穩定性好等特點得到了廣泛運用。公司生產的半導體器件KMZ52是一種專門用於電子指南針的二維磁場感測器。它採用磁場感測器的磁阻(MR)技術,並用翻轉技術消除信號偏移,而用電磁反饋技術來消除溫度的敏感漂移。由於外界存在干擾,該系統集成了幾種特殊的抗干擾技術來提高系統精度。本文介紹了電子指南針的工作原理及電路設計,同時給出了其抗干擾設計以及信號和數據的處理方法。
原理
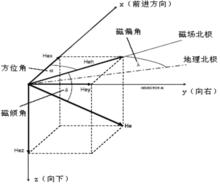
Z1和Z4為翻轉線圈,Z2和Z3為補償線圈。由於環境溫度可能會影響系統精度,因此,在高精度系統中,可以通過補償線圈對其進行補償。內部有兩個正交的磁場感測器? 分別對應二維平面的X軸和Y軸。磁場感測器的原理是利用磁阻(MR)組成磁式結構,這樣可改變電磁物質在外部磁場中的電阻係數。以便在磁場感測器的翻轉線圈Z1和Z2上載入翻轉電信號後使之能夠產生變化的磁場。由於該變化磁場會造成磁阻變化(ΔR)0並將其轉化成變化的差動電壓輸出,這樣,就能根據磁場大小正比於輸出差動電壓的原理,分別讀取對應的兩軸信號,然後再進行處理計算即可得到偏轉角度。整個電子指南針系統主要由感測器單元、信號調整單元(SCU)、方向確定單元(DDU)和顯示單元四部分組成。電子指南針的總體設計框圖如圖2所示。圖中,磁場感測器KMZ52用於將地磁場信號轉化成電信號輸出,信號調整單元用於將磁場感測器單元中的輸出信號成比例放大,並將其轉換成合適的信號hex和hey,同時消除信號的偏移。對於保證系統的精度來說,SCU是最重要的部件。通過DDU可將信號調整單元輸出的兩路信號hex和 hey進行放大,然後再按下式計算出偏轉角度α:α=arctan?hey/hex 這樣根據抗干擾技術算法對α進行處理就可得出該磁場的偏轉角度,最後通過顯示單元進行輸出。
 電子指南針電路原理圖
電子指南針電路原理圖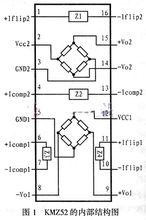 KMZ52的內部結構圖
KMZ52的內部結構圖硬體
內部橋式結構的磁阻輸出是差動電壓,通過運算放大器可以成比例放大,因此,在測量地磁場信號時,為了將兩個磁場感測器信號放大同樣的倍數,可以將二者的翻轉線圈串聯,並對差動電壓選用同樣的運放結構。翻轉信號從①口輸入,X、Y軸差動電壓信號則分別從②、③口輸出。然後通過處理系統對傳來的信號進行A/D採樣、數值處理和校正後,即可得到所求的角度。
數據
由於KMZ52的輸出信號很微弱,故信號干擾較大。在輸出幅值很小的位置上,通常有300mV左右且變化很大的干擾;而在輸出幅值時則近似保持恆值。兩路信號幅值與角度的關係如圖4所示。
為使二者的比值接近tanα?0<α<90° 的變化,可以在幅值較大且數值變化較小的角度範圍內,使幅值保持基本不變;而在幅值較小且數值變化較大的角度範圍內,用一個函式改變其幅值變化曲線。具體實現時,可按照一定角度對曲線進行分段,並對各段用一次函式y=ax+b去擬合。這樣,就可以使幅值變化曲線接近tanα。角度劃分越細,精度越高。磁場感測器KMZ52的精度為3°,若按15°劃分,可將精度提高到1°。若按5°對其劃分,精度可高達0.3°。如劃分更細,精度還可進一步提高。若採用高階函式去擬合,也可以提高精度。實際上,在精度要求不高的情況下,通常以15°劃分就可以達到要求。
校正
有時候,某些外來磁場疊加會產生一個恆定磁場,這個磁場對系統指示將造成影響。故可採用如下方法對其進行校正:讓整個系統在水平面上旋轉一周,干涉磁場與地球磁場疊加會有一個最大值Vmax和一個最小值Vmin,記錄下這兩個值和達到最大值(或最小值)的角度φ,再經過校正,即可消除磁場的影響。 設地球磁場的大小為Vear,干擾磁場的大小為Vdis?則有:Vear=(Vmax+Vmin)/2?Vdis=(Vmax-Vmin)/2?這樣,由正弦定理Vear/sinφ=Vdis/sinγ可求出γ。然後在α上加上γ角即可消除干擾磁場的影響。
