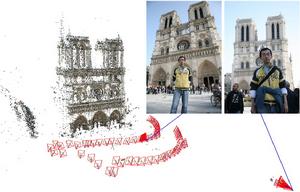
運動恢復結構(Structure from Motion, SfM)在計算機視覺指的是,通過分析物體的運動得到三維結構信息的過程。
人類通過移動獲得很多環境的三維結構信息。當觀察者自己或者其周圍的物體運動的時候,可以從獲得的圖象中獲取信息。
運動恢復結構需要解決立體圖像恢復結構類似的問題:找到三維物體圖像的對應點。
為了找到對應點,需要在圖像間跟蹤一些類似角點(多方向有梯度值的邊緣)的特徵。特徵沿時間的軌跡將被用來重建三維結構與相機運動。
 運動恢復結構
運動恢復結構典型步驟
一個典型的運動恢復結構算法涉及到下面的若干個步驟:
1. 圖像特徵提取
2. 估計場景的初始結和相機運動
3. 最佳化估計的結果
4. 標定相機
5. 得到場景的稠密描述
6. 推導場景的幾何、紋理以及反射屬性
軟體工具箱
1.StructurefromMotiontoolboxbyVincentRabaud
2.MatlabFunctionsforMultipleViewGeometrybyAndrewZissermann
3.StructureandMotionToolkitbyPhilTorr
4.MatlabCodeforNon-RigidStructurefromMotionusingFactorisationbyLorenzoTorresani
5.StructurefromMotionforUnorderedPhotoCollectionsbyNoahSnavely
