平面直角坐標系中的轉軸公式
設坐標軸的旋轉角為θ,P是平面的任意一點,在原坐標系xOy中的坐標為(x,y),在新坐標系x′Oy′中的坐標為(x′,y′)(如圖1),則
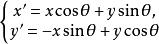
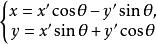 轉軸公式
轉軸公式或
 轉軸公式
轉軸公式叫做坐標軸的旋轉公式,簡稱 轉軸公式。
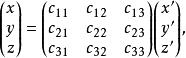
說明:(1)為便於記憶,可將轉軸公式寫成矩陣形式:
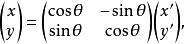 轉軸公式
轉軸公式或
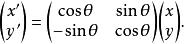 轉軸公式
轉軸公式矩陣的乘法按如下規定進行:
 轉軸公式
轉軸公式(2)逆時針旋轉坐標軸時,旋轉角θ取正值;順時針旋轉坐標軸時,旋轉角θ取負值 。
空間直角坐標系中的轉軸公式
 轉軸公式
轉軸公式 轉軸公式
轉軸公式空間直角坐標變換是一類重要的坐標變換,設空間任意一點M在空間直角坐標系{O;i,j,k}的坐標為(x,y,z),在新坐標系{O′;i′,j′,k′}的坐標為(x′,y′,z′).即有=xi+yj+zk,=x′i′+y′j′+z′k′。又設新原點O′在舊坐標系中的坐標為(h,h,h),新坐標系的基i′,j′,k′在舊坐標系中的方向餘弦為(cos α,cos β,cos γ) (i=1,2,3),即:
 轉軸公式
轉軸公式=hi+hj+hk,
i′=i cos α+j cos β+k cos γ,
j′=i cos α+j cos β+k cos γ,
k′=i cos α+j cos β+k cos γ.
 轉軸公式
轉軸公式將(cos α,cos β,cos γ)改記為(ccc) (i=1,2,3),則由得
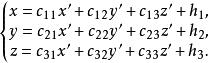 轉軸公式
轉軸公式這就是 空間直角坐標變換公式。其中的9個係數c並不互相獨立,由於i,j,k和i′,j′,k′都是由互相正交的單位向量組成的標準正交基,方向餘弦c滿足下列6個正交條件:
 轉軸公式
轉軸公式對應的係數矩陣(c)是正交矩陣,即(c) (c)=I.特別地,當(c)=I,即坐標變換公式為
 轉軸公式
轉軸公式此式稱為坐標軸的平移公式,簡稱 移軸公式。而當(h,h,h)=(0,0,0)時,則坐標變換公式為
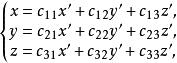 轉軸公式
轉軸公式即
 轉軸公式
轉軸公式此式稱為坐標軸的旋轉公式,簡稱 轉軸公式。因新、舊坐標系皆為右手系,故det(c)=1 。
