原理介紹
 距離矢量
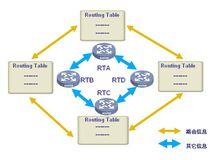
距離矢量距離矢量路由算法是動態路由算法。它是這樣工作的:每個路由器維護一張矢量表,表中列出了當前已知的到 每個目標的最佳距離,以及所使用的線路。通過在鄰居之間相互交換信息,路由器不斷地更新它們內部的表。
距離矢量路由算法最常見的是Ford-Fulkerson算法。該算法的核心思想是使用標號的方法不斷尋找一個圖上的 可增廣路徑並且進行調整,直到找不到可增廣路徑為止。距離矢量路由算法號召每個路由器在每次更新時傳送它 的整個路由表,但僅僅給它的鄰居。距離矢量路由算法傾向於路由循環,但比鏈路狀態路由算法計算更簡單。
在距離矢量路由選擇算法中,每個路由器維持有一張子網中每一個以其他路由器為索引的路由選擇表,表中的 每一個項目都對應於子網中的每個路由器。此表項包括兩個部分,即希望使用的到目的地的輸出線路和估計到達 目的地所需時間或距離。用度量標準可為站點,估計的時間延遲(ms),該路出排隊的分組估計總數或類似的值。
假定路由器知道它到每個相鄰路由器的“距離”。如果度量標準為站點,其距離就為一個站點;如果度量標準是佇列長度,則路由器會簡單地檢查每個佇列;如果度量標準是延遲,路由器可以直接傳送一個特別“回響”(ECHO)分組來測出延遲,接收者只對它加上時間標記後就儘快送回。
