
諧波磁場的產生
異步電動機中諧波磁場的產生,主要是由於以下兩方面的原因。
(1)繞組磁勢曲線不是正弦波形;
(2)空氣隙是齒形構造,不是光滑、均勻的。
下面分別進行分析:
1、由於定子繞組磁勢曲線為非正弦波而產生的諧波磁場
由定子繞組磁勢曲線可知磁勢沿氣隙圓周的分布並不是正弦形,而是階梯形。並且說明過一個矩形波實際上是由基波(頻率和原波形相等)和許多諧波共同組成的。
階梯形的定子繞組磁勢曲線可以看成是許多不同的矩形波的迭加。既然矩形波是由基波和許多次諧波所組成,因此階梯波也必然是由基波和許多次諧波所組成。階梯波中的基波,其頻率和繞組磁勢曲線本身頻率相等,因而基波極數就等於電動機極數,它的幅值最大並產生電動機的主磁場。基波以外的各次諧波,其頻率為基波的整倍數,因而其磁場極數也為主磁場的整倍數。
單個矩形波,其諧波次數為三、五、七、九……奇數次。然而,單繞組多速電動機繞組磁勢曲線的波形常具有不同的情形,它可能既含有三、五、七、九……奇次諧波,又含有二、四、六、八……偶次諧波 。
2、由於氣隙的齒形構造而產生的諧波磁場
異步電動機定子鐵心是開有槽、齒的,因而沿圓廚空氣隙是齒形構造而不是光滑、均勻的。以前我們在畫繞組磁勢曲線時並沒有考慮到這個因素,實際上是把鐵心看作具有圓柱形的光滑平面。
 諧波磁場
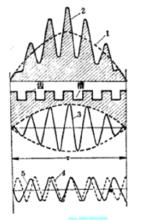
諧波磁場鐵和空氣兩者導磁能力有很大差別。因此當空氣隙是齒形構造時,轉子和定子之間對著齒的部分,其導磁能力比對著槽的部分要強得多。觀察下圖(圖中假定轉子鐵心為光滑平面),如果定子鐵心沒有槽和齒,電動機氣隙主磁場波形將如曲線1所示,為正弦形。實際上由於齒和槽兩者導磁能力的差別,主磁場波形將變成曲線2(陰影部分)所示的波形。曲線2實際上是由曲線1和曲線3兩者合成的。曲線3是一個幅值變化著的(變化規律也為正弦波)正弦波,振幅變化的最大值和零值分別和曲線1的最大值和零值重合。曲線3的頻率比曲線1高得多.仔細觀察它的波形可以看到每隔一個齒距它就變化一周,因此它在電動機全圓周上的變化周數就等於定子鐵心的槽數 。
 齒諧波磁場
齒諧波磁場 諧波磁場 諧波磁場
諧波磁場 諧波磁場基波磁場在氣隙全圓周上的變化周數等於電動機的極對數p。曲線3的周數恰好是基波的 倍,因此曲線3的頻率也恰好是基波的 倍。
 諧波磁場
諧波磁場 諧波磁場
諧波磁場 諧波磁場
諧波磁場 諧波磁場 諧波磁場 諧波磁場
諧波磁場 諧波磁場 諧波磁場理論分析證明:像曲線3那樣的,振幅按正弦規律(正弦規律的周數和基波相等,等於p)變化的正弦波,又可以分解成如上圖中曲線4、5兩個等幅的正弦波。其中曲線4在氣隙全圓周上的周數等於 ,因而其頻率為基波的( )倍;曲線5在氣隙全圓周上的周數等於 ,因而其頻率為基波的( )倍。如果把曲線1看作基波,曲線4和曲線5就可以看作是()次和()次諧波。
 諧波磁場
諧波磁場歸納以上分析,結論是:由於空氣隙的齒形構造,繞組基波磁場將產生次數為()的一對諧波磁場。這種由於空氣隙的齒形構造而產生的諧波磁場叫做“齒諧波磁場”,其諧波次數相對較高。
齒諧波磁場次數雖然較高,但卻是高次諧波中最嚴重的諧波,因此必須予以特別注意。
當然,繞組基波磁場會產生一對齒諧波磁場,繞組諧波磁場也同樣會產生齒諧波磁場。不過,由於繞組諧波磁場比基波磁場小得多,它產生的齒諧波磁場在實用上已可以忽略。
轉子方面的諧波磁場
前面分析的都是定子方面的諧波磁場,實際上轉子方面也同樣會產生諧波磁場。因為定子繞組磁勢曲線中每一個波,不論是基波還是任意一次諧波,都會在轉子繞組中感應出一個與它同次的交變電流,這個電流除了產生與定子同次的交變磁場外,還會產生其餘不同次的高次諧波磁場。
 諧波磁場
諧波磁場 諧波磁場
諧波磁場 諧波磁場
諧波磁場 諧波磁場
諧波磁場根據理論分析,如定子繞組諧波磁場次數為(基波可以看成為一次諧波,即),則它在轉子繞組中感應產生的諧波磁場次數,其中為轉子槽數,k為零以及任意正、負整數(一般取k=±1就夠了,k=±2以上的高次諧波已很微弱,可以忽略)。
 諧波磁場
諧波磁場如果轉子鐵心不是閉口槽,即表面也有槽和齒,那么,和定子方面一樣,轉子也會產生齒諧波磁場,其次數為。它的影響在高次諧波中也比較嚴重。
諧波次數的統一
電動機的極數有不同的數值。換句話說,不同極數的電動機,基波磁場的極數也不同。這就會帶來一個問題,即同一次諧波磁場對於不同的電動機將有不同的極數。
例如一隻兩極電動機,其基波磁場為兩極;二次諧波磁場為四極;三次諧波磁場為六極……。一隻四極電動機,其基波磁場為四極;二次諧波磁場為八極;三次諧波磁場為十二極……。同是二次諧波,一個極數為四,一個極數為八。這樣,分析時就很不方便,甚至會造成混亂。
為此目的,我們規定:不論電動機基波極數多少,都以兩極波為基準,規定為1次波。四、六、八、十……極波依次規定為2、3、4、5……次波。如果電動機是一隻四極電動機,就說該電動機的基波是2次波,它的二次諧波是4次波,三次諧波是6次波,依次類推。
經過這樣統一後,不論電動機基波極數如何,同一次諧波磁場的極數就一致了——1次波為兩極,2次波為四極,3次波為六級……也就是:諧波磁場級數=諧波次數×2,另外,也可以明顯看到:統一後諧波次數=統一前諧波次數×p。
諧波磁場影響的克服方法
諧波磁場對電動機性能的影響,有三個方面:一是可能產生異步和同步附加轉矩,從而影響電動機的起動性能;二是可能產生振動噪音;三是增加電動機損耗,降低效率。
異步附加轉矩的克服方法
異步附加轉矩的影響是使電動機的轉矩曲線發生凹陷,嚴重時造成電動機的低速潛行,不能起動到正常的額定轉速。
產生異步附加轉矩的原因是定子繞組磁場中某一次或幾次諧波幅值比較強。因此,欲減小異步附加轉矩就必須從削弱諧波磁場入手。這可以用以下兩種方法:
(1)採用諧波較少的繞組方案
一隻單速異步電動機改繞成單繞組多速電動機,在排列繞組方案時可能同時有幾種方案存在,不同的繞組方案所含諧波情況也不同。在可能的條件下,從減少諧波磁場影響角度上考慮,以採用諧波較少的繞組方案為好。
比較不同方案的諧波情況時,可以畫出不同方案的磁勢曲線,根據它們與正弦波形的相差程度即可作出判斷。由於所取三相電流瞬間的不同,磁勢曲線形狀也不同,因此畫不同方案磁勢曲線時所取三相電流瞬間應一致。對於一個方案,則應至少取兩個瞬間畫出其相應的磁勢曲線,以便做出比較正確的判斷。
(2)選擇適當跨距
繞組係數等於短距係數和分布係數的乘積,每一次諧波也都有它的繞組係數,它等於該次諧波的短距係數和分布係數的乘積。如果我們有意識地選擇跨距使某一次諧波的短距係數很小,甚至等於零;那末該次諧波的繞組係數就會很小,甚至等於零;該次諧波磁場也會很小甚至等於零,它所產生的異步附加轉矩也就跟著會變得很小甚至完全消除。
同步附加轉矩的克服方法
同步附加轉矩的影響是使電動機起動轉矩發生波動,轉子在某些位置時出現“死點”,起動不出;或者使電動機轉矩曲線在某一點附近產生同步谷,嚴重時和異步附加轉矩一樣,造成電動機的低速潛行。
同步附加轉矩的產生是轉子諧波和同次定子諧波相互作用的結果。這些諧波次數一般都較高,就幅值來說,除齒諧波外一般都較小(有些轉子諧波次數可能較低,但它卻是由高次的定子諧波感應產生的,因此幅值也較小)。因此可以認為同步附加轉矩主要是由齒諧波產生的。
克服同步附加轉矩的方法主要是削弱齒諧渡幅值,以及選擇適當的定、轉子槽配合以減少或避免定、轉子諧波之間的同次,特別是要避免齒諧波的同次。
(1)削弱齒諧波幅值的方法
削弱齒諧波幅值的有效方法是採用斜槽,通常是用於轉子上,就是轉子的槽不與電動機軸線平行而扭斜一個角度,斜度一般為等於或接近一個定子齒距。
採用斜槽以後,在每個槽斜度的一段距離內氣隙導磁能力將比較均勻,因而就可以削弱齒諧波的強度。
(2)減少或避免定、轉子諧波同次的方法
在繞組方案已定的情況下,減少或避免定、轉子諧波同次的方法是:
1)選擇適當的定、轉子槽數配合,這個方法是主要的。
2)選跨距為滿距 。
