
名詞解釋
機器人編程分為幾個層次,從最簡單的開始到最進步的人工智慧。
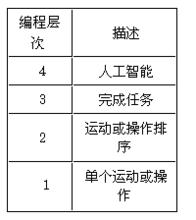
結構模式
圖表是一個4層結構模式。
 示教盒
示教盒第一層示教盒的例子為車門遠程控制器。當無線接收方從遠程單元接收到信號,控制器就會鎖上或打開車門。另一個第一層示教盒的例子為控制高保真語音系統或磁帶記錄機(VCR)的遠程箱。
第二層示教盒的例子為控制電話應答機器的微電腦。當有電話撥入時,微電腦從記憶體中讀取一連串的操作。機器應答電話,進行通知,記下留言,然後重置等待下一個電話。
第三層示教盒套用在航空、軍事和工業套用中。第三層,人工智慧(AI)的下一層,叫任務層編程。在第三層上的程式可以指揮機器人完成一個完整的操作,例如在車道上剷除積雪或操縱飛機完成偵察任務。
機器人的動作通過按動按鈕、擺動搖桿或其他三維控制設備來寫入記憶體中。機器人的行走路線、速度變數、旋轉度數和抓舉動作都是可程式的。當記憶體被讀取時,機器人就會以特定順序、特定程度和速度完成動作。
