簡介
 圖紙
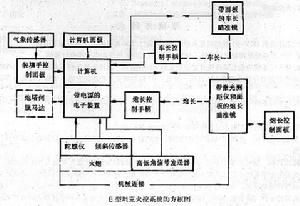
圖紙名稱 E型坦克火控系統
Type E Tank Fire control System
研製單位 博福斯航空電子公司
Bofors Aerotonics,SE
生產單位 博福斯航空電子公司
Bofors Aerotonics,SE
現狀 生產
裝備情況 用於改裝遜邱倫、M48及早期的M60等老式坦克
系統組成
1.觀瞄設備
(1)帶控制臺的車長瞄準鏡
(2)帶雷射測距儀的炮長晝/夜瞄準鏡 該瞄準鏡有1個單目晝用瞄準鏡、1個使用微通道板像增強器的單目夜視瞄準鏡以及1個組合式結構的雷射測距儀。測
 坦克
坦克距儀的接收器與夜視通道組裝在一起,發射器的光學系統與其他通道是分開的,所有這4個通道都是相互平行的。晝/夜瞄準鬮和雷射測距儀與陀螺穩定的火炮組裝在一起。瞄準線的方向由頭部反射鏡控制,反射鏡為所有的通道所公用,在高低和方位兩個方向上由計算機進行伺服控制。頭部反射鏡是完全穩定的,不管炮塔以及車體怎樣運動都可進行火炮瞄準。雷射測距儀的工作物質是摻釹釔鋁石榴石單晶(Nd:YAG)
2.數字式火控計算機
該計算機是系統的中心,能接收預筠墳定的或連續的輸入信號,並根據一系列自動的或手動的輸入信息計算所需的提前角和瞄準角。這些輸入信息包括目標距離、目標角速度、所選擇的彈藥種類、炮耳軸傾斜、視差(炮膛和瞄準線之間)、定起角、偏流、氣象數據(包括溫度、橫風和順逆風)以及藥溫。
為了向彈道計算機人工輸入信息,操作手面板上裝有旋鈕和開關。當監視自動測量或人工輸入的數據時,可以使用1個帶選擇開關的發光二極體顯示器。
在計算機箱體中有10塊外掛程式板,可以完成下述功能:雷射測距計算;彈丸飛行時間、瞄準角、提前角和視差等計算;瞄準鏡的輔助電控功能,如用於保護像增強器的快門的控制等;炮長瞄準鏡的伺服控制;瞄準鏡中和面板上的數據顯示;有關不同操作類型的邏輯操作、彈藥選擇等。
3.修正量感測器
炮耳軸傾斜是用一個其軸線平行於炮軸線的陀螺來測量的。
氣象感測器測量橫風、逆(或順)風、氣溫和氣壓。
此外,自動輸入修正量感測器還包括目標角速度感測器。
4.火炮控制系統
該系統是在方位和高低向都採用以控制手柄來控制角速度,與就是通常說的半自動控制方式。炮長使用雙向控制手柄進行控制,可以平穩、準確地控制火炮,也可以增加1個供車長使用的控制手柄,使炮長和車長都能進行火炮瞄準。
原理與特點
該火控系統是在IKV-91輕型坦克火控系統的基礎上發展起來的,二者有如下不同:
(1)E型火控系統使用數字計算機,IKV-91坦克火控系統使用電子模擬計算機。
(2)E型火控系統的炮長瞄準鏡有完全穩定的頭部反射鏡,無論車體怎樣運動都可進行火炮瞄準,因此可用於運動的坦克對付運動或靜止的目標,而IKV-91輕型坦克火控系統僅適合於靜止坦克對付運動或靜止的目標。
(3)E型火控系統中套用了垂直基準陀螺儀代替IKV-91輕型坦克火控系統中的單擺裝置,用來測量炮耳軸傾斜。
使用該火控系統的典型射擊過程概括如下:
(1)車長發現目標,並按下“捕獲目標”按鈕,炮塔自動調轉到適當的方向,以使炮長瞄準線與車長瞄準線方向一致。 (2)跟蹤目標。炮長對整個射擊過程進行控制,當平穩跟蹤目標時就使用雷射測距儀測距。測到的距離顯示在炮長的光學系統中並自動輸入給計算機。計算機根據輸入的各種參數進行計算,將所需要的瞄準角和提前角連續傳送給火炮。在此過程中,炮長瞄準鏡一直瞄準目標(不論火炮是否在運動),這是通過一個反向旋轉的偏轉元件(瞄準鏡頭部反射鏡)來實現的,因此該火控系統是一種非擾動式的火控系統。
(3)射擊。當提前角和瞄準角由計算機連續計算出後,接著就可快速地發射炮彈,因為為了摧毀先進的複合裝甲,多次命中同一塊裝甲是很重要的。
典型的作戰時間是車長把目標指示給炮長需要2s,炮長跟蹤目標、操縱雷射測距儀及發射首發炮彈需6s,向同一目標發射第二發彈還需4s。
性能數據
炮長瞄準鏡
放大倍率夜視8.5×;晝用7×、3×
視場夜視5.7°;晝用9°、20°
入瞳夜視150mm;晝用 50mm
出瞳7mm
視度調節±5屈光度
Nd:YAG雷射測距儀(組裝在炮長瞄準鏡中)
峰值輸出功率1.8MW
脈衝寬度15~20ns
測量距離200~6000m
脈衝間隔1次/2s
數字式計算機
距離200~6000m(來自雷射測距儀或手動輸入)
高低向提前角-10~+70mrad
方位向提前角±40mrad
定起角±5mrad
初速修正±50m/s
氣溫-30~+50℃
藥溫±40℃
橫風±20m/s
順(逆)風±30m/s
炮耳軸最大傾斜角±14°
電源直流18~30V
火炮控制系統
最大迴轉速度±300mrad/s
目標最大方位角速度 ±80mrad/s
最大高低角速度 ±80mrad/s
目標最大高低角速度 ±40mrad/s
