
控制裝置
 牽引力控制
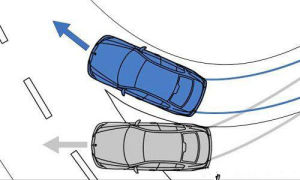
牽引力控制當輪胎的滑轉率適中時,汽車能獲得最大的驅動力。轉彎時如果使輪胎產生較大的滑轉,將使汽車的加速能力變好。該系統可以利用轉向盤轉角感測器檢測汽車的行駛狀態,判斷汽車是直線行駛還是轉彎,並適當地改變各輪胎的滑轉率。
工作原理
ASR是驅動防滑系統(AccelerationSlipRegulation)的簡稱,其作用是防止汽車起步、加速過程中驅動輪打滑,特別是防止汽車在非對稱路面或轉彎時驅動輪空轉,並將滑移率控制在10%—20%範圍內。由於ASR多是通過調節驅動輪的驅動力實現控制的,因而又叫驅動力控制系統,簡稱TCS,在日本等地還稱之為TRC或TRAC。
ASR和ABS的工作原理方面有許多共同之處,因而常將兩者組合在一起使用,構成具有制動防抱死和驅動輪防滑轉控制(ABS/ASR)系統。該系統主要由輪速感測器、ABS/ASRECU、ABS執行器、ASR執行器、副節氣門控制步進電機和主、副節氣門位置感測器等組成。在汽車起步、加速及運行過程中,ECU根據輪速感測器輸入的信號,判定驅動輪的滑移率超過門限值時,就進入防滑轉過程:首先ECU通過副節氣門步進電機使副節氣門開度減小,以減少進氣量,使發動機輸出轉矩減小。ECU判定需要對驅動輪進行制動介入時,會將信號傳送到ASR執行器,獨立地對驅動輪(一般是後輪)進行控制,以防止驅動輪滑轉,並使驅動輪的滑移率保持在規定範圍內。
TRC主動牽引力控制系統的機械結構能防止車輛的雪地等濕滑路面上行駛時驅動輪的空轉,使車輛能平穩地起步、加速,支持車輛行駛的基本功能。在雪地或泥濘的路面,TRC主動牽引力系統均能保證流暢的加速性能。此外,在上下陡坡、險惡的岩石路面等,四輪驅動車所獨有的越野行駛路況下,TRC也能適當控制車輪的側滑。比起配備傳統的中央差速器鎖止裝置的車輛而言,配備TRC的車輛具有前者無法比擬的駕乘感和操縱性。
控制系統設計
邏輯門限算法
門限控制的實質是“窮舉法”,其邏輯複雜、需經大量試驗方可選定門限,但不需要測量(控制對象狀態的)感測器,因而被ABS和TCS普遍採用。
增量PI控制器
PI控制方法簡單、精度高,但參數不能線上調整;自適應PI控制方法參數整定較困難;模糊控制線上推理方法魯棒性強,但計算量大、實時性差,模糊查詢方法存在控制精度與控制器存儲容量之間難以解決的矛盾。
神經網路控制器
神經網路算法魯棒性強,適用於確定非定常、非線性的多輸入多輸出系統的輸出與輸入間的關係。
