
基本概念
系統校正和補償
系統校正,就是在系統中加入一些參數可以根據需要而改變的機構或裝置,使整個系統的特性發生改變,從而滿足給定的各項性能指標 。
通過校正完成對性能指標的滿足,這一過程就是補償。
性能指標
由系統的接收單位提出的對系統性能的合理要求就是系統設計的性能指標。
校正補償方式
校正位置
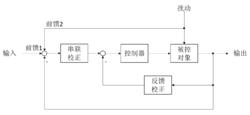
根據校正裝置在系統中的連線方式,控制系統校正方式可分為:串聯校正、反饋校正、前饋校正和複合校正。
對校正裝置連線在系統誤差測量點之後、放大器之前,串聯在系統前向通道之中的校正方式,稱為串聯校正;校正裝置連線在局部反饋迴路中的方式為反饋校正;校正裝置連線在系統給定值之後、主反饋作用點前的方式為前饋校正(或者是校正裝置連線在擾動點和誤差測量點之間);複合校正是指使用了以上三種校正方式中的兩種或三種。
 滯後補償
滯後補償補償效果
根據補償作用的效果,補償分為超前補償、滯後補償和超前-滯後補償三種形式。
具有超前相位的補償網路,稱為超前補償網路;類似的,具有滯後相位的補償網路,稱為滯後補償網路;同時具有超前部分和滯後部分的補償網路,稱為超前-滯後補償網路。
滯後補償
無源滯後網路
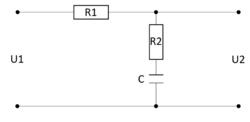
無源滯後網路是一種常用的補償裝置,這裡以最簡單的無源補償電路為例 。
 滯後補償
滯後補償該滯後補償網路的傳遞函式為
 滯後補償
滯後補償其中,b稱為滯後網路的分度係數,表示滯後深度。該網路的滯後特性圖如概述圖所示。
採用無源滯後網路進行串聯校正時,主要是利用其高頻幅值衰減的特性,以降低系統的開環截止頻率,提高系統的相角裕度。
串聯滯後校正
除了利用滯後網路,PI控制器也可以進行滯後補償。無論使用那種方式,都是利用了其高頻幅值衰減的特性,來獲得足夠的相角裕度。因此,滯後補償裝置的最大滯后角應力求避免發生在系統截止頻率附近。
純滯後補償
純滯後是指在物料、能量或信號傳輸過程中由於傳輸速度有限而產生的延遲 。一般純滯後就是指由傳輸速度限制導致的滯後。
在工業過程中,純滯後環節普遍存在,因此在現代控制領域,針對純滯後環節的補償策略也有很多。
其中最常用的是,採樣控制和史密斯預估控制;此外,近些年逐漸發展的還有預估控制、自適應控制等。
採樣控制是一種定周期的斷續控制方式,即控制器以一定時間間隔採樣一次被控參數,與設定值比較後經控制規則產生控制信號,只要該時間間隔大於純滯後時間,就可以逐漸修正控制系統的不穩定狀態。
該方法犧牲了控制速度,採取等待的方式避免控制器因為純滯後產生過反應、過操作。這是一種比較簡單粗糙的解決方案,對於精度和速度要求不高的系統較為適用。
Smith預估控制按照對象特性,設計一種模型加入到反饋控制系統,估計出對象在擾動作用下的動態回響,提早進行補償,使控制器提前動作,從而降低超調量,加速調節過程。
