
簡介
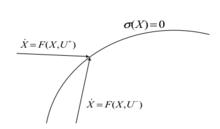 圖 1 切換面附近的系統軌跡
圖 1 切換面附近的系統軌跡滑動模態變結構控制是 50 年代末由前蘇聯 Emelyanov 等人最先提出經 Utkin 等人進一步研究而發展起來的一類非線性控制系統的綜合設計方法,它是變結構控制系統的一種控制策略。這種控制策略與常規控制的根本區別在於控制的不連續性,即一種使系統“結構”隨時間變化的開關特性。該控制特性可以迫使系統在一定特性下沿規定的狀態軌跡作小幅度、高頻率的上下運動,即所謂的“滑動模態”或“滑模”運動。這種滑動模態是可以設計的,且與系統的參數及擾動無關。這樣,處於滑模運動的系統就具有很好的魯棒性。
滑模變結構控制(變結構控制)系統是指存在一個(或幾個)切換函式,當系統的狀態達到切換函式值時,系統從一個結構轉換成另一個結構的系統,也就是在控制過程中,系統結構(或稱為模型)可發生變化的系統。如圖1 所示。
發展過程
滑模變結構控制出現於20世紀50年代,經歷了多年的發展, 已形成了一個相對獨立的研究分支,成為自動控制系統的一種一般的設計方法。 以滑模為基礎的變結構控制系統理論經歷了3個發展階段。
第1階段為以誤差及其導數為狀態變數研究單輸入單輸出線性對象的變結構控制;20世紀60年代末開始了變結構控制理論研究的第2階段,研究的對象擴大到多輸入多輸出系統和非線性系統;進入80年代以來,隨著計算機、大功率電子切換器件、機器人及電機等技術的迅速發展,變結構控制的理論和套用研究開始進入了一個新的階段,所研究的對象已涉及到離散系統、分布參數系統、滯後系統、非線性大系統及非完整力學系統等眾多複雜系統,同時,自適應控制、神經網路、模糊控制及遺傳算法等先進方法也被套用於滑模變結構控制系統的設計中。
滑模變結構控制的定義
帶有滑動模態的變結構控制叫做滑模變結構控制或滑模控制。 通過開關的切換, 改變系統在狀態空間的切換面S(x)=0兩邊的結構。開關切換的法則稱為控制策略,它保證系統具有滑動模態。此時,分別把S=S(x)和S(x)=0稱為切換函式和切換面。這時,滑動模態即指系統的運動點(狀態變數)趨近於該區域時,就被“吸引”到該區域運動。系統在滑模區的運動稱為“滑模運動” 。滑模運動具有一個性質,即:滑模運動與控制對象的參數變化和擾動無關,這正是滑模控制的特點所在。
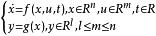
設有一個系統:
 滑模變結構控制
滑模變結構控制其中,x、u、y 分別表示系統的狀態變數、輸入變數、輸出變數, n、m、l 分別表示系統的狀態變數的維數、輸入變數的維數、輸出變數的維數, R 表示實數域。
 滑模變結構控制
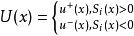
滑模變結構控制需要確定切換函式向量 具有的維數一般情況下等於控制的維數。並且尋求變結構控制:
 滑模變結構控制
滑模變結構控制 滑模變結構控制
滑模變結構控制這裡的變結構體現在 ,使得:
 滑模變結構控制
滑模變結構控制(1)滑動模態存在,即式 成立。
 滑模變結構控制
滑模變結構控制(2)滿足到達條件:切換面 以外的相軌跡將於有限時間內到達切換面。
(3)切換面是滑動模態區,且滑模運動漸近穩定,動態品質良好。
滿足上面三個條件的控制叫做滑模變結構控制。
滑模變結構控制的抖振問題
抖振問題簡述
從理論角度,在一定意義上,由於滑動模態可以按需要設計, 而且系統的滑模運動與控制對象的參數變化和系統的外干擾無關,因此滑模變結構控制系統的魯棒性要比一般常規的連續系統強。然而,滑模變結構控制在本質上的不連續開關特性將會引起系統的抖振。對於一個理想的滑模變結構控制系統,假設“結構”切換的過程具有理想開關特性(即無時間和空間滯後),系統狀態測量精確無誤,控制量不受限制,則滑動模態總是降維的光滑運動而且漸近穩定於原點, 不會出現抖振。但是對於一個現實的滑模變結構控制系統,這些假設是不可能完全成立的。特別是對於離散系統的滑模變結構控制系統,都將會在光滑的滑動模態上疊加一個鋸齒形的軌跡。於是,在實際上,抖振是必定存在的,而且消除了抖振也就消除了變結構控制的抗攝動和抗擾動的能力, 因此,消除抖振是不可能的,只能在一定程度上削弱它到一定的範圍。抖振問題成為變結構控制在實際系統中套用的突出障礙。
產生原因
抖振產生的主要原因有:
(1)時間滯後開關。在切換面附近,由於開關的時間滯後,控制作用對狀態的準確變化被延遲一定的時間。因此時間滯後開關的作用將在光滑的滑動模態上疊加一個衰減的三角波。
(2)空間滯後開關 。開關的空間滯後作用相當於在狀態空間中存在一個狀態量變化的“死區”。因此,其結果是在光滑的滑模面上疊加了一個等幅波形。
(3)系統慣性的影響。由於任何的物理現實系統的能量不可能無限大,從而使系統的控制力不能無限大,這就必然使系統的加速度有限,因此系統的慣性總是存在的,於是,控制的切換必然伴有滯後。這種滯後造成的抖振與時間滯後開關造成的後果類同。系統慣性與時間滯後開關共同作用的結果將使衰減三角波的幅度增大。系統慣性與空間滯後開關共同作用時,如果抖振幅度大於空間滯後開關“死區”,則抖振主要呈衰減三角形波;如果抖振幅度小於或等於該“死區”時,則抖振呈等幅振盪波形。
(4)系統時間純滯後和空間“死區”的影響。有許多控制系統本身存在時間純滯後及控制滯後,這些滯後往往比開關的時間及空間滯後大得多,從而會造成很大的抖振。如果處理不當,甚至引起整個系統的不穩定。
(5)狀態測量誤差對抖振的影響。狀態測量誤差主要是使切換面攝動,而且往往伴有隨機性。因此,抖振呈現不規則的衰減三角波;測量誤差越大,抖振的波幅也越大。
(6)時間離散滑模變結構控制系統的抖振。時間離散系統的滑動模態是一種“準滑模”,它的切換動作並不是正好發生在切換面上,而是發生在以原點為頂點的一個錐形體的表面上。因此,必然有衰減的抖振,而且錐形體越大,抖振幅度越強。該錐形體的大小與採樣周期有關。此外,採樣周期實質上也是一種時間滯後,同樣能造成抖振。
抖振的強弱與上述因素的大小有關,就實際意義而言,“相比之下,切換開關本身的時間及空間滯後對抖振的影響是小的(特別是採用計算機時,計算機的高速邏輯轉換以及高精度的數值運算使開關的時間及空間滯後實際上不存在),然而,開關的切換動作造成控制不連續性則是抖振發生的本質原因。
危害
(1) 對系統動態性能的影響,有可能破壞系統滑動模態的運行條件,從而系統出現超調過大、過渡過程增長、甚至出現不穩定狀態。
(2) 平衡點附近的抖振,將會使系統的靜態指標降低。
(3) 抖振的存在,對系統將會造成機械磨損,能耗增大。
(4) 高頻抖振還有可能激發系統固有振盪源,對系統造成更大影響,甚至無法正常運行。
抖振的處理方法
1) 濾波方法。通過採用濾波器,對控制信號進行平滑濾波,是削減抖振的有效方法。
2) 消除干擾和不確定性的方法。在常規滑模控制中,往往需要很大的切換增益來消除外加干擾及不確定項,因此,外界干擾及不確定項是滑模控制中抖振的主要來源。利用觀測器來消除外界干擾及不確定性成為解決抖振問題研究的重點。
3) 遺傳算法最佳化方法。遺傳算法是建立在自然選擇和自然遺傳學機理基礎上的疊代自適應機率性搜尋算法,在解決非線性問題時表現出很好的魯棒性、全局最優性、可並行性和高效率,具有很高的最佳化性能。
4) 降低切換增益方法。由於抖振主要是由於控制器的不連續切換項造成,因此,減小切換項的增益,便可有效地抑制抖振。
5) 扇形區域法。
