
結構介紹
 水下特種推進電機
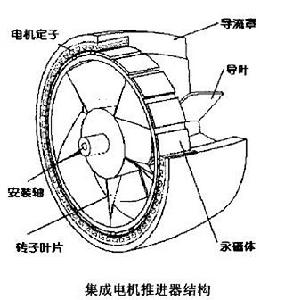
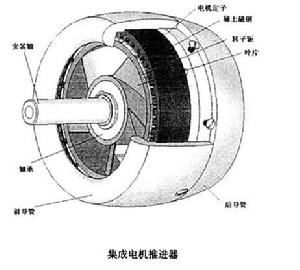
水下特種推進電機右圖是集成電機推進器結構圖。集成電機推進器由集成電機,導流罩,轉子葉片和靜葉柵組成。電機用於直接驅動螺旋槳,電機的轉子和泵噴推進器的轉子設計為一體,電機磁鋼安裝在轉子輪緣上,轉子通過軸承安裝在安裝軸上,可以繞軸自由轉動。電機的定子和推進器導流罩設計為一體,電機的電樞鐵心安裝固定在導流罩內。電機的轉子和定子需要分別進行絕緣和密封處理,整個電機工作在水中,電機的散熱問題可以得到很好的解決。推進器的靜葉柵安裝在轉子的後方,用於消除液流的旋轉運動,平衡扭矩。集成電機推進模組(IMP)通過安裝軸可以比較方便的安裝在水下航行器上,電機電纜通過導流罩,靜葉柵和安裝軸中的通道與電機控制裝置連線。控制裝置安裝在水下航行器內部,由計算機控制。
類型選擇
 水下特種推進電機
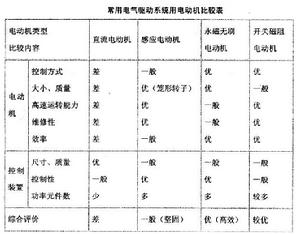
水下特種推進電機電動機類型的選擇對動力系統以及航行器整體性能有較大影響,需要對不同電動機及其控制方式進行比較和分析。目前正在套用或開發的中小功率驅動電機主要有直流電動機、感應電動機、永磁無刷電動機、開關磁阻電動機四類。由這四類電動機所組成的驅動系統,其總體比較如表所示。
直流電動機具有結構簡單的特點並有優良電磁轉矩控制的特性,所以直到 20世紀80年代中期它仍是國內外的主要研發對象,目前直流驅動系統還在廣泛的套用。但是普通直流電動機的機械換向結構易產生電火花,不宜在多塵、潮濕、易燃易爆環境中使用,其換向器維護困難,很難向大容量、高速度發展。此外,電火花產生的電磁干擾,對高度電子化的水下航行器來說將是致命的。此外,直流電動機價格較高、體積和重量大。隨著控制理論和電力電子技術的發展,直流驅動系統與其它驅動系統相比,己處於劣勢。
感應電動機是目前套用最廣泛的電機,廠礦企業,交通工具,娛樂,科研農業生產,日常生活都離不開感應電動機。常見的有鼠籠式異步電動機,繞線式異步電動機和各種控制用電動機三大類。一般的感應電機有啟動力矩小、過載能力低、體積大、效率低、調速不理想等缺點,在要求較高的場合下,往往不能滿足要求。
永磁無刷電動機系統可以分為兩類,一類是方波驅動的無刷直流電動機系統(BDCM),另一類是永磁同步電動機系統(PMSM),也稱之為正弦波驅動的無刷直流電動機系統。BDCM系統不需要絕對位置感測器,一般採用霍爾元件或增量式碼盤,也可以通過檢測反電動勢波形換相。PMSM系統一般需要絕對式碼盤或旋轉變壓器等轉子位置感測器。從磁鐵所處不同位置的結構上看,永磁無刷電動機可以分成表面型、鑲嵌型、深埋式等結構型式。
開關磁 阻電動機(SRM)目前己投入實際使用,SRM是沒有任何形式的轉子導體和永久磁鐵的無刷電動機,它的定子磁極和轉子磁極都是凸的。由於SRM具有集中的定子繞組和脈衝電流,其功率變換器可以採用更可靠的電路拓撲形式。SRM具有簡單可靠、在較寬轉速和轉矩範圍內高效運行、控制靈活、可四象限運行、回響速度快、成本較低等優點。但SRM有轉矩波動大、噪聲大、需要位置檢測器、系統非線性特性等缺點。所以,目前套用還受到限制。
可以看到,相對而言無刷直流電機結合了直流電機與交流同步電機的優點,具有體積小,壽命長,控制簡單,調速精度高的特點,且不會失步。考慮到集成電機推進系統使用的特種電機在結構上受到了很大限制,並且推進系統對電機調速性能的要求,集成電機推進系統使用永磁直流無刷電機是比較適合的。
無刷直流電動機可分為正弦波電機和方波電機,正弦波電機的磁通分布為正弦波形式。方波電機的磁通分布為120。的平頂方波,瓦片永磁體的充磁方向為徑向激磁,極弧寬度大於120’電角度,若採用整距集中繞組,可獲得梯形反電勢,電樞電流為矩形波。推進系統中選用了方波電機,它與正弦波電機相比,具有電機與電力電子控制電路結構簡單、工作可靠、在同樣的情況下材料利用率高,出力大、控制方法簡單的優點。
發展及套用
IMP最早是由美國海軍水下作戰中心和賓夕法尼亞州立大學套用研究實驗室聯合研製的,最初用於無人潛行器,是把電機放在潛行器的外罩內。這種布置省去了常規電機的冷卻水套,電機輔助冷卻系統,驅動軸和連軸節。這樣可以增加潛行器的有效負載,而且內部空間的布置非常靈活,大有好處。節省下來的空閫可以用於安裝輔助感測器或儲存能量,從而提高了執行任務的能力和續航力。該IMP的電機選用永磁同步電機,這種電機的優點是功率密度大、效率高而且聲學性能極佳。
正是由於IMP的優點突出,西方一些已開發國家很重視IMP的發展。目前IMP的套用領域不斷的擴大,除了在水下機器人套用外,隨著推進功率的提高和某些關鍵技術的成熟,有些IMP模組將逐漸被用於電動魚雷和潛艇電力推進系統。IMP模組有著十分廣闊的發展前景,由於他相對傳統的電力推進裝置有明顯的優勢,它的出現很可能會對水下推進帶來一次革命。
但是,在國內對集成電機推進裝置的研究可以說還是空白,到目前為止,未見到有關產品或實驗樣機的報導,國內相關資料也寥寥無幾。
優點
集成電機推進模組相對現有推進裝置的優點可以總結為一下幾點:
1.大多的IMP的電機都使用無刷直流電動機(一種同步電機),無刷直流電動機是電動機技術和電子技術結合的機電一體化新型電機。無刷直流電動機的主要特徵是具有與普通有刷直流電動機相似的機械特性以及必須有電子換向電路。無刷直流電動機徹底取消了機械換向器和電刷,這樣在可靠性方面和電磁兼容方面有了很大的改善,同時無刷電機又具備和傳統直流電動機相同的線性機械特性,有調速範圍寬、起動力矩大、效率高等優點。
2.由於IMP只占用航行器內部很小的體積,這樣可以使航行器有效容積得到很好利用,節省下來的內部空間可以用於安放儀器或電池,從而提高了航行器執行任務的能力和航程,而傳統的推進裝置則要占用很大一部分航行器內部體積。
3.IMP推進器的噪音小,集成電機推進器的螺旋槳是由電機直接帶動的,而且螺旋槳導管也可以抑制空泡的出現,所以整個裝置噪音較低。
4.整個IMP可後期安裝,從而減小了建造周期,便於維護。
5.相對傳統的電力推進裝置,由於IMP是工作在水中環境的所以在電機設計中基本不需要考慮電機冷卻問題,同時IMP也省去了聯軸節等傳動裝景,這樣增加了動力推進系統的靠性。
設計過程
特種電機的總體方案設計
集成電機推進器電機的主要技術指標如下:
(1 )額定輸出功率:P≈160w;( 2)額定電流 :I<7A;( 3)額定電壓:u=48V; (4)工作轉速:no≈750rpm; (5)工作狀態:長期運行;(6)外形尺寸:φ137mm X L30mm推進器可以完成啟動,調速,制動等一系列動作。
無刷直流電動機 (永磁同步電動機)是集成電機推進器的本體,是控制器和轉子位置感測器於一身的機電一體化的電機,因而對於給定的技術指標,首先應從整個系統的角度出發確定總體方案,包括以下幾個方面。
1、特種電機的電磁結構設計
磁路設計是要求計算出稀土永磁體的尺寸、外磁路特性,並作出永磁體工作圖,求出工作點的氣隙磁感應強度及氣隙總磁通。在具體設計計算中,主要是確定其磁化方向厚度以確定永磁體去磁曲線坐標值。
集成電機設計為方波電動機,要求是獲得方波氣隙磁感強度,瓦片永磁體的充磁方向為徑向激磁,極弧寬度大於120°電角度,在換向允許的條件下,極弧寬度應儘量取大,這樣可減小力矩波動。
2、集成電機結構設計
 水下特種推進電機
水下特種推進電機集成電機是集成在推進器內部的,所以推進器的結構對電機定子和轉子的結構有了很大的限制,電機的設計要與推進器外形的設計相結合,設計推進器的外觀見圖。由於IMP特殊的需要,使用在泵噴推進的電機是一個扁平型的電機,它在結構上有以下特點:
(1)由於泵噴推進器需要有足夠大的過流面積,這就對電機的定子軛、轉子軛和磁極的厚度有一定的限制。在電機設計允許的情況下,要求使電機定子軛和轉子軛厚度儘量小,電機齒的高度儘量小(這部分是安放在導流罩內部的,受到導流罩壁厚度的尺寸限制)。但是,如果電機磁路中定予軛和轉圈子軛的厚度過小,磁場會很容易達到飽和狀態,使電機氣隙磁感應強度B s降低,不能達到良好的工作狀態。
3、電機的驅動和控制電路設計
(1)電機的電樞繞組和開關主電路設計
目前最常用的無刷電機繞組形式為三相繞組。對於逆變器,三相橋式換向電路可實現較好的電機性能。集成電機的使用電壓為48V直流電源,採用一個整體的RCD緩衝電路。電機的電樞繞組採用星形繞組,相數為三相,繞組形式採用整距集中繞組。逆變器接法採用橋式接法,使用6個MOSFET功率場效應管做驅動元件組成三相橋式逆變器,其中三個為P溝道,三個為N溝道。電機的工作方式為兩相導通三相六狀態,每隔60度電角度改變一次通電狀態。
(2)電機的控制技術
集成電機推進器在水下工作,受到水流的影響使電機的轉矩會有較大的波動,電機工作轉速較低並且集成電機推進器在使用中可能會頻繁啟動,這種工作情況不適合無感測器無刷電機,考慮以上情況在設計中無刷電機設計為帶位置感測器(霍爾元件)的無刷電機。
目前控制電路主要有以下幾種形式:①分立元件全模擬電路;②數模混合控制電路;③智慧型集成控制電路;④全數字控制電路。其中分立元件電路在許多經濟實用型無刷直流電動機中起主導地位,但電機的可靠性和性能受到影響。專用積體電路克服了分立元件帶來的弊端,使控制電路體積小,克靠性高,對於特定環境下完成特定功能,其缺點是擴展性較差。
電機的設計計算
1、電機磁路
磁路概念的建立是基於鐵磁物質的磁導率大大地超過了非鐵磁物質的磁導率。也就是說,由磁導率大的導磁體構成磁通的路徑。通常按照安排的路徑而閉合的磁通稱為主磁通中,而不按照這種路徑閉合的磁通稱為漏磁通。漏磁通的計算比較困難,近似計算也比較複雜。在電機磁路計算中漏磁通中,一般按經驗取值。
2、電機設計結果的校核
一般的磁路設計方法是建立在磁路分析基礎上的,所用的磁路等效計算方法往往難以準確的計算磁場的分布,這樣可能會造成永磁的浪費或電機磁場分布不合理。比如定子或轉子局部尺寸不合理造成的磁場分布不合理,在傳統設計方法中就是較難發現的。如果使用有限元方法對電機進行磁路校核,就可以比較好的避免傳統設計方法的一些缺點。目前,隨著有限元軟體的通用化和商業化,有限元方法在電機設計和分析中套用的越來越廣泛。
電機的控制系統
 水下特種推進電機
水下特種推進電機控制器是無刷直流電機正常運行並實現各種調速伺服功能的指揮中心。一般的無刷電機控制系統主要由:轉速給定、速度反饋、轉子位置感測器信號、主控單元、驅動電路、主功率電路等部分組成,其系統框圖如圖所示。
控制系統有數字系統和模擬系統兩種方案。在模擬系統中,利用專用控制晶片,無需軟體介入,安裝晶片的連線方法添加外部電路,控制電機的運行。在數字系統中,利用單片機或PC104採集給定轉速和電機的實圖無刷電機系統際轉速,由程式進行分析和比較,輸出驅動信號從而達到控制電機的目的。由此可見模擬系統的結構比較簡單,無需編程;數字系統結構相對複雜,但是通用性比較強,適應於將來的改進。
特點
1.特種電機做了水密處理,整個電機的機械部分可以在水中工作,對於水下推進器裝置來說是一種創新。
2. 設計的集成電機推進器原理樣機,通過簡單的改裝就可以安裝在水下航行器上。相比該航行器原來使用的推進系統來說,集成電機推進器只占用了航行器內部很小的體積(安裝推進器控制電路),這樣大大的增加了航行器有效容積。由於節省下來的內部空間可以用於安放儀器或電池,所以有助於提高航行器執行任務的能力和航程。
3. 整個集成電機推進系統可以後期安裝,便於維護。集成電機推進系統可以作為整個航行器系統的一個模組,這樣節省了航行器的製造周期,也有較強的通用性。
4. 集成電機推進系統省去了普通推進系統需要的聯軸節等傳動裝置,並且不用考慮電機本體的散熱問題,使整個系統有較高的可靠性。
