簡介
氣味跟蹤機器人是2013年3月日本東京大學科學家研究的能跟蹤氣味信息的新型機器人。它用雄性蠶蛾帶動一個小型的兩輪機器車來追蹤空氣中雌蠶蛾釋放的性信息素,以研究蠶蛾的神經與運動機制。
氣味跟蹤機器人未來也將裝上高靈敏感測器,來監控環境中泄露的污染物,追尋味源。
移動原理
選擇雄蠶蛾來做機器車駕駛員,因為它們會跳一種“交配之舞”。當它們受到雌蠶蛾釋放的性信息素的刺激時,就會展現一種完全不同的走路方式:走直線的摺尺形路線,伴隨幾個轉身和超過360度的鏇轉。
雄蠶蛾跟蹤氣味的行為簡單而有效,能全面分析從單個神經元到整體追蹤行為的神經機制,然後模仿這種機製造出一種“人工腦”,裝在移動機器人上,相當於科學家研究的昆蟲控制機器車。
構造特徵
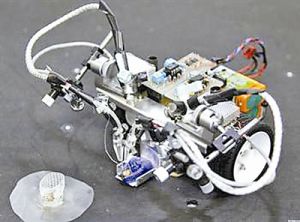 氣味跟蹤機器人
氣味跟蹤機器人 車前面還有兩個40毫米的風扇,可將空氣中所含的性信息素吹到蠶蛾面前,就好像蠶蛾的翅膀不斷拍打能讓空氣流過它超靈敏的氣味天線。
跟蹤測試
在實驗中,研究人員用了一個1800毫米長的風道,把信息素和機器車分別放在風道兩端。他們測試了14隻蠶蛾,所有蠶蛾都能成功地引導機器人到達味源。
他們還進行了一項轉彎實驗,改變機器車兩個馬達中一個的功率,這樣它在運動時就會轉向一邊,蠶蛾就必須不斷調整方向,改變自身位置才能到達目的地。
特殊用途機器人
機器人是以自動或半自動方式執行工作的機器裝置,它既可以接受人類指揮,又可以運行預先編排的程式,有一部分特殊用途機器人專門適用於一類或幾類特定的領域。 | |
|---|---|
| 畢卡索機器人 | 通過觀測記錄旅客的睡眠過程,為旅客提供個人化藝術作品的睡眠圖像。 |
| 蜻蜓機器人 | 採用四翼碳纖維摺疊翅膀,每秒可拍打20次,可通過手機進行控制,並傳送至難以抵達的區域。 |
| 猜拳機器人 | 機器人通過分析人類的手指動作、變化情況,就能準確猜出對手想出剪刀、石頭還是布。 |
| 蜂鳥機器人 | 與現實中的蜂鳥大小相似,有望幫助在廢墟中開展救援工作或搜尋罪犯。 |
| 接吻機器人 | 能夠模擬和傳送接吻的感覺,帶給遠距離的異地戀人額外的親密接觸。 |
| 氣味跟蹤機器人 | 根據昆蟲性信息素來引導機器人機械運動追蹤氣味,以用於監控環境等方面。 |
| 書法機器人 | 它不僅能夠捕捉書寫者的動作軌跡,還能完美記錄每個筆畫的力度,進而進行精確重現。 |
| 嘔吐機器人 | 能通過嘔吐幫助科學家分析在英國肆虐的諾如病毒,從而找出防止該病毒傳播的良方。 |
