
氣動中心
在一定雷諾數下,當翼型迎角改變時,翼型所受到的空氣動力對於此點的合力矩不變,那么這一點就稱為該翼型在當前雷諾數下的氣動中心,又稱作焦點。
多數傳統翼型的氣動中心位於0.23至0.24弦長處,層流翼型氣動中心在0.26~0.27倍的弦長處。
氣動中心與壓力中心不同:壓力中心是力系合成到一個特殊點時,使得這個點的合力矩為0的點,壓力中心在氣動中心的後面;而氣動中心是使得合力矩不變的點。壓力中心的位置隨著迎角的改變而改變,當迎角增大,升力增大,壓力中心前移,這同時使得壓力中心與氣動中心的距離縮短,增大的升力與縮短力臂乘積剛好是不變的力矩,這也正是氣動中心的定義所要求的。
不同雷諾數、不同翼型氣動中心位置不一樣:翼型準確的氣動中心位置主要是通過實驗測得的,在一些比較全的翼型書中會標有“a.c.position”的字樣,同時在下面列舉了不同雷諾數所對應的氣動中心位置。這些氣動中心的位置在不同雷諾數下各不相同,且在垂直弦長方向上並不為0,但在一般的葉片設計、氣動模擬計算中,對應雷諾數和翼型的氣動中心位置數據不一定能找到,所以將氣動中心位置取為弦長1/4處是可以接受的。
定義
氣動中心位置,又稱焦點位置。氣動中心距機翼平均氣動弦前緣沿弦向的無量綱距離。對於飛機通常以機翼平均氣動弦長的百分數計量。
簡介
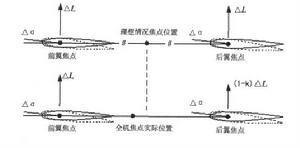 氣動干擾對全機焦點影響示意圖
氣動干擾對全機焦點影響示意圖焦點是飛行器氣動增量的作用點。焦點位置對於飛行器縱向穩定性至關重要,重心與焦點的位置關係是飛行器 縱向靜穩定性的決定因素。一般機翼的焦點和翼型的焦點差不多位於相同的百分比位置處,在亞音速時為1 /4平均氣動弦長(MAC)位置;在超音速時是0. 4倍平均氣動弦長位置處。對於聯排翼布局飛機,如果前後機翼完全相同,且不考慮氣動干擾,排翼布局飛機全機焦點位置就是前、後機翼焦點連線的中心位置,但是實際上因為後翼處於前翼的下洗區,考慮速度阻滯、前翼尾流在後翼產生紊流等因素的影響,兩個機翼間存在氣動干擾,其中主要是前翼對後翼的氣動干擾使得後翼升力係數減小、阻力係數增大,從而使得全機焦點前移,無法得到理論結果,如圖所示,圖中△a為迎角的微小增量,可以認為機翼的氣動增量的方向和原來升力的方向沒有變化,k前翼對後翼的氣動干擾使得後翼的升力係數減小的部分。
在設計時為了提高串列式機翼的氣動效率,在機翼的水平和垂直方向都要間隔一定的間距,只有當兩者中至少一個為無窮大時,理論上氣動干擾才為零,全機焦點才位於理論位置。因為飛機的其它部件,如機身,儘管對阻力影響很大但是對整機升力的影響較小,所以將機翼的焦點作為全機的焦點。聯/排翼布局飛行器焦點位置計算的關鍵是前翼對後翼的氣動干擾與水平、垂直間距等因素間關係的定量研究。
超聲速巡航時氣動焦點和重心的配合控制
超聲速巡航是新型作戰飛機和民用飛機的一個重要特徵。具備小加力超聲速巡航能力的作戰飛機有更高的速度機動性,反應能力更快,在空戰中可以迅速接近敵方目標進行攻擊,完成攻擊後又可以迅速脫離,降低被敵方飛彈擊中的機率。另一方而,超聲速飛機的運輸能力和航程都使得這類飛機在商業貿易方而有著廣闊的套用前景。
飛機超聲速飛行時,山於存在零升波阻以及氣動焦點大幅度後移,導致飛行阻力驟增,飛機升阻比顯著減小。針對這一問題,目前研究較多的是通過設計降低波阻的飛機外形來減小零升波阻,並取得了很多研究成果;而主動重心控制技術是上世紀80年代末提出來的一種新技術,它是通過對飛機重心和氣動焦點的介理匹配,來減小飛機升致阻力,從而可實現對飛行阻力的進一步減弱。主動重心控制技術在美國、歐洲等航空已開發國家得到廣泛研究和套用。美國NASA Langley研究中心提出利用主動重心控制技術改善飛機性能的研究思路。
北京航空航大大學張晶等設計了適用於某型飛機超聲速巡航的主動重心控制系統,它是通過對平衡輸油系統的管理實現飛機重心的偏移,使飛機的重心與氣動焦點介理匹配,從而降低了飛機超聲速巡航時的飛行阻力,在一定程度上改善了飛機的飛行性能,具有一定的套用價值。
CRW的焦點位置
鴨式旋翼/機翼(CRW)飛機是三翼面(即鴨翼、旋轉機翼和平尾)布局的一種新概念複合升力飛機,該飛行器既可以像直升機那樣進行垂直起降和定點懸停,又具有固定翼飛機的高速巡航特性。設計概念研究表明這種鴨式旋翼/機翼飛機實現了對無人駕駛垂直起降的任務需求,是一種可行的未來艦載無人偵察機及有人駕駛武裝攻擊飛機的候選者。1998年波音公司最先提出鴨式旋轉機翼(Canard rotor/wince-CRW)的概念。
 旋轉機翼壓力中心隨轉角的變化
旋轉機翼壓力中心隨轉角的變化飛機增加了前鴨翼,這是為了增加在旋翼模式轉換到固定翼模式過程中的全機升力,以保證旋轉機翼卸載後鴨 翼與平尾可以承擔全機的升力。在過渡飛行階段的後期,雖然旋翼己經卸載,但是轉速並沒有馬上降為零,旋轉機翼的展弦比較小,當旋轉機翼展向與機身平行時受前機身上洗流影響較大,主要表現為焦點位置的變化和升力的變化,以及由此導致的俯仰力矩的變化,旋轉機翼的焦點位置變化如圖所示。
