
模糊控制和變結構控制
與基於數學模型的古典控制的間接法相比,模糊控制是一種不需要系統數學模型的直接控制方法,特別適合於那些定義不完善或難以精確建模的複雜過程。
變結構控制的優點是能夠克服系統的不確定性,對於擾和未建模動態具有很強的魯棒性;缺點是用於補償干擾和未建模動態的高控制增益和在滑動面附近控制行為的高頻轉換而產生抖振現象。
模糊控制的控制作用在整個控制過程中按照推理規則而改變,可以看做一類變結構控制。但模糊控制和變結構控制有兩點不同:(1)變結構控制是利用滑動模態來設計的,而模糊控制是依據專家和操作人員的經驗而設計的;(2)當系統軌跡穿越滑動面時,變結構控制的控制作用的改變通常是不連續的,從而產生滑動模態,而模糊控制的控制作用的改變是連續的,不具有滑動模態。
模糊變結構控制的簡介
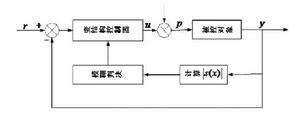 圖1 模糊變結構控制系統框圖
圖1 模糊變結構控制系統框圖模糊變結構控制是一種混合控制器,兼有模糊控制和 變結構控制的優點;既解決了模糊控制系統的穩定性和魯棒性問題,又削弱了變結構控制中的抖振。其基本方法是在變結構控制系統的趨近階段通過模糊邏輯調節控制作用來補償未建模動力學的影響,使得系統軌跡既能快速趨近滑動面又能降低抖振,從而提高了變結構控制系統的品質。
模糊變結構控制系統框圖如圖1所示。
模糊控制和變結構控制的結合方式
將模糊控制和變結構控制相結合基本分為兩種方式:一種通過模糊控制規則自適應地調整符號函式項的幅度;另一種通過模糊控制規則直接確定滑動模態控制量,即直接把開關函式及其微分作為輸入量,通過模糊推理獲得滑動模態控制的控制量。後種方式具有直接、簡單且保持整個系統穩定性的特點。
模糊變結構控制分類
模糊滑動面法
由於在趨近階段變結構控制系統對參數變化和外部干擾很敏感,而只有在滑動模態才具有完全魯棒性。因此,縮短甚至消除到達時間是提高控制系統魯棒性的一個很有效的方法。一個容易的加速趨近過程的方法是利用高增益反饋,而這又會加劇抖振。
模糊滑動面法提出如下推理規則:如果系統狀態離滑動面遠,則採用較大的反饋增益,目的是加快趨近過程;如果系統狀態離滑動面近,則採用較小的反饋增益,目的是降低抖振。
這種方法僅僅是邊界層法的重新定義,而不是更廣意義上的變結構控制,且同樣需要不確定性的界來保證系統的穩定性和魯棒性。該方法是對飽和函式的分段線性逼近,由隸屬函式的形狀而決定逼近的程度,且當模糊集是均勻對稱分布的正則集時,模糊推理的輸入輸出關係就等於飽和函式。
模糊Lyapunov函式法
該方法與模糊滑動面法的不同之處在於模糊控制器的輸入除了滑動函式外,又考慮了滑動函式的變化,在常規的模糊控制系統中,模糊控制器的輸入一般取兩項:系統偏差及其導數,控制的目的是使系統偏差趨於零。模糊變結構控制的目的是使滑動函式趨於零,即使系統狀態沿滑動面運動。
