概述
 模擬加工
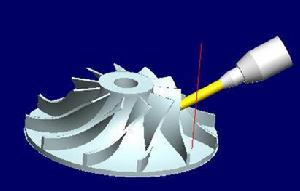
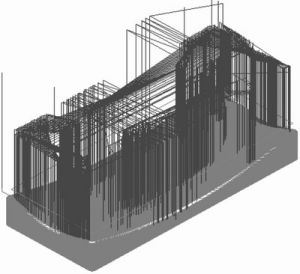
模擬加工模擬加工是採用一個套用虛擬現實技術於數控加工操作的仿真軟體,對數控工具機操作全過程和加工運行全環境進行仿真,從而進行數控模擬加工,完成整個加工過程的仿真。使原來需要在數控設備上才能完成的大部分加工功能可以在這個虛擬製造環境中實現。
模擬加工也稱作仿真加工。仿真技術是利用模型復現實際系統中發生的本質過程,並通過對系統模型的實驗來研究存在的或設計中的系統,又稱模擬。這裡所指的模型包括物理的和數學的,靜態的和動態的,連續的和離散的各種模型。所指的系統也很廣泛,包括電氣、機械、化工、水力、熱力等系統,也包括社會、經濟、生態、管理等系統。當所研究的系統造價昂貴、實驗的危險性大或需要很長的時間才能了解系統參數變化所引起的後果時,仿真是一種特別有效的研究手段。仿真的重要工具是計算機。仿真與數值計算、求解方法的區別在於它首先是一種實驗技術。仿真過程包括建立仿真模型和進行仿真實驗兩個主要步驟。
簡史
 模擬加工
模擬加工20世紀初模擬仿真技術已得到套用。例如在實驗室中建立水利模型,進行水利學方面的研究。40~50年代航空、航天和原子能技術的發展推動了仿真技術的進步。60年代計算機技術的突飛猛進,為仿真技術提供了先進的工具,加速了仿真技術的發展。
利用計算機實現對於系統的仿真研究不僅方便、靈活,而且也是經濟的。因此計算機仿真在仿真技術中占有重要地位。50年代初,連續系統的仿真研究絕大多數是在模擬計算機上進行的。50年代中,人們開始利用數字計算機實現數字仿真。計算機仿真技術遂向模擬計算機仿真和數字計算機仿真兩個方向發展。在模擬計算機仿真中增加邏輯控制和模擬存儲功能之後,又出現了混合模擬計算機仿真,以及把混合模擬計算機和數字計算機聯合在一起的混合計算機仿真。在發展仿真技術的過程中已研製出大量仿真程式包和仿真語言。70年代後期,還研製成功專用的全數字並行仿真計算機。
分類
 模擬加工
模擬加工模擬仿真可以按不同原則分類:
1、按所用模型的類型(物理模型、數學模型、物理-數學模型)分為物理仿真、計算機仿真(數學仿真)、半實物仿真;
2、按所用計算機的類型(模擬計算機、數字計算機、混合計算機)分為模擬仿真、數字仿真和混合仿真;
3、按仿真對象中的信號流(連續的、離散的)分為連續系統仿真和離散系統仿真;
4、按仿真時間與實際時間的比例關係分為實時仿真(仿真時間標尺等於自然時間標尺)、超實時仿真(仿真時間標尺小於自然時間標尺)和亞實時仿真(仿真時間標尺大於自然時間標尺);
5、按對象的性質分為宇宙飛船仿真、化工系統仿真、經濟系統仿真等。
基本內容
 模擬加工
模擬加工1、仿真模型
仿真模型是被仿真對象的相似物或其結構形式。它可以是物理模型或數學模型。但並不是所有對象都能建立物理模型。例如為了研究飛行器的動力學特性,在地面上只能用計算機來仿真。為此首先要建立對象的數學模型,然後將它轉換成適合計算機處理的形式,即仿真模型。具體地說,對於模擬計算機應將數學模型轉換成模擬排題圖;對於數字計算機應轉換成源程式。
2、仿真實驗
通過實驗可觀察系統模型各變數變化的全過程。為了尋求系統的最優結構和參數,常常要在仿真模型上進行多次實驗。在系統的設計階段,人們大多利用計算機進行數學仿真實驗,因為修改、變換模型比較方便和經濟。在部件研製階段,可用已研製的實際部件或子系統去代替部分計算機仿真模型進行半實物仿真實驗,以提高仿真實驗的可信度。在系統研製階段,大多進行半實物仿真實驗,以修改各部件或子系統的結構和參數。在個別情況下,可進行全物理的仿真實驗,這時計算機仿真模型全部被物理模型或實物所代替。全物理仿真具有更高的可信度,但價格昂貴。
3、仿真工具
主要指的是仿真硬體和仿真軟體。仿真硬體中最主要的是計算機。用於仿真的計算機有三種類型:模擬計算機、數字計算機和混合計算機。數字計算機還可分為通用數字計算機和專用的數字計算機。模擬計算機主要用於連續系統的仿真,稱為模擬仿真。在進行模擬仿真時,依據仿真模型(在這裡是排題圖)將各運算放大器按要求連線起來,並調整有關的係數器。改變運算放大器的連線形式和各係數的調定值,就可修改模型。仿真結果可連續輸出。因此,模擬計算機的人機互動性好,適合於實時仿真。改變時間比例尺還可實現超實時的仿真。60年代前的數字計算機由於運算速度低和人機互動性差,在仿真中套用受到限制。現代的數字計算機已具有很高的速度,某些專用的數字計算機的速度更高,已能滿足大部分系統的實時仿真的要求,由於軟體、接口和終端技術的發展,人機互動性也已有很大提高。因此數字計算機已成為現代仿真的主要工具。混合計算機把模擬計算機和數字計算機聯合在一起工作,充分發揮模擬計算機的高速度和數字計算機的高精度、邏輯運算和存儲能力強的優點。但這種系統造價較高,只宜在一些要求嚴格的系統仿真中使用。除計算機外,仿真硬體還包括一些專用的物理仿真器,如運動仿真器、目標仿真器、負載仿真器、環境仿真器等。仿真軟體包括為仿真服務的仿真程式、仿真程式包、仿真語言和以資料庫為核心的仿真軟體系統。
4、仿真方法
主要是指建立仿真模型和進行仿真實驗的方法,可分為兩大類:連續系統的仿真方法和離散事件系統的仿真方法(見仿真方法)。人們有時將建立數學模型的方法也列入仿真方法,這是因為對於連續系統雖已有一套理論建模和實驗建模的方法,但在進行系統仿真時,常常先用經過假設獲得的近似模型來檢驗假設是否正確,必要時修改模型,使它更接近於真實系統。對於離散事件系統建立它的數學模型就是仿真的一部分。
發展方向
 模擬加工
模擬加工仿真技術得以發展的主要原因,是它所帶來的巨大社會經濟效益。50年代和60年代仿真主要套用於航空、航天、電力、化工以及其他工業過程控制等工程技術領域。在航空工業方面,採用仿真技術使大型客機的設計和研製周期縮短20%。利用飛行仿真器在地面訓練飛行員,不僅節省大量燃料和經費(其經費僅為空中飛行訓練的十分之一),而且不受氣象條件和場地的限制。此外,在飛行仿真器上可以設定一些在空中訓練時無法設定的故障,培養飛行員應付故障的能力。訓練仿真器所特有的安全性也是仿真技術的一個重要優點。在航天工業方面,採用仿真實驗代替實彈試驗可使實彈試驗的次數減少80%。在電力工業方面採用仿真系統對核電站進行調試、維護和排除故障,一年即可收回建造仿真系統的成本。現代仿真技術不僅套用於傳統的工程領域,而且日益廣泛地套用於社會、經濟、生物等領域,如交通控制、城市規劃、資源利用、環境污染防治、生產管理、市場預測、世界經濟的分析和預測、人口控制等。對於社會經濟等系統,很難在真實的系統上進行實驗。因此,利用仿真技術來研究這些系統就具有更為重要的意義。在仿真硬體方面,從60年代起採用數字計算機逐漸多於模擬計算機。混合計算機系統在70年代一度停滯不前,80年代以來又有發展的趨勢,由於小型機和微處理機的發展,以及採用流水線原理和並行運算等措施,數字仿真運算速度的提高有了新的突破。例如利用超小型機 VAX 11-785和外圍處理器AD-10聯合工作可對大型複雜的飛行系統進行實時仿真。在仿真軟體方面,除進一步發展互動式仿真語言和功能更強的仿真軟體系統外,另一個重要的趨勢是將仿真技術和人工智慧結合起來,產生具有專家系統功能的仿真軟體。仿真模型、實驗系統的規模和複雜程度都在不斷地增長,對它們的有效性和置信度的研究將變得十分重要。同時建立適用的基準對系統進行評估的工作也日益受到重視。
仿真教學
 模擬加工
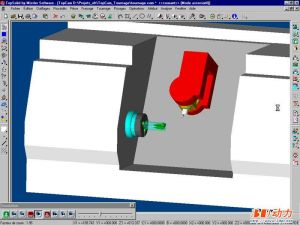
模擬加工隨著虛擬現實技術及計算機技術的發展,出現了可以模擬實際工具機加工環境及其工作狀態的計算機仿真加工系統,它是一個套用虛擬現實技術於數控加工操作技能培訓的仿真軟體。利用計算機仿真培訓系統進行學習和培訓,不僅可以迅速提高被培訓人員的理論、操作水平,而且非常安全,可靠好,培訓費用低。
目前在國內已經有一些中等職業學校將計算機仿真運用於數控操作人才培訓的教學之中,也出現了各種數控加工仿真教學系統,如上海宇龍、南京宇航、廣州數控、武漢金銀花等不同的數控加工仿真軟體。上述這些教學系統既能單機系統獨立運行,又能實現線上運行。獨立運行即工具機模型方式,其培訓設施只需一台微機,數控工具機的模擬操作在顯示屏顯示的仿真面板上進行,而零件切削過程由工具機模型通過三維動畫演示。實踐證明,用這種方式進行初步培訓是非常經濟有效的。線上運行即工具機工作方式,在這種方式下,教學系統將與實際工具機連線,由硬體實現零件切削過程,這時除了操作者是用仿真面板操作外,其它則與實際工具機的真實情況一樣。即利用計算機和其他的專用硬體、軟體去產生一種真實場景的仿真,操作者可以通過與仿真場景的互動,來體驗一種接近於真實的場景的感覺。因此,採取這種方法能進一步提高操作者的實際操作技能。
數控仿真系統的核心是虛擬數控工具機,而虛擬數控工具機又是虛擬製造技術中的一個重要的執行單元。它不僅在數控加工過程中為產品設計提供了可製造性的分析,而且在數控系統的學習和培訓中,為被培訓人員提供了完善的學習方法和學習環境。數控仿真系統完全模擬真實零件的加工過程,可以檢驗各種數控指令是否正確,能提供與真實工具機完全相同的操作面板,其調試、編輯、修改和跟蹤執行等功能也一應俱全。
1、仿真教學套用
虛擬數控工具機實際上是虛擬環境中數控工具機的模型。與真實工具機相比,虛擬數控工具機具有以下的功能和特點:
虛擬數控工具機具有與真實工具機完全相同的結構。虛擬數控工具機能模仿真實工具機的任何功能而不致因為採用某種近似替代而導致某種結構和信息的失真或丟失,並與真實工具機有完全相同的界面風格和對應功能,如動態鏇轉、縮放、移動等功能的實時互動操作,從而為學員的學習和培訓提供保證。
工具機操作全過程仿真。仿真工具機操作的整個過程:毛坯定義,工件裝夾,壓板安裝,基準對刀,安裝刀具,工具機手動操作。
豐富多樣的刀具庫。系統採用資料庫統一管理的刀具材料、特性參數庫,含數百種不同材料、類型和形狀的車刀、銑刀,同時還支持用戶自定義刀具及相關特性參數。
全面的碰撞檢測。手動、自動加工等模式下的實時碰撞檢測,包括刀炳刀具與夾具、壓板、刀具,工具機行程越界,主軸不轉時刀柄刀具與工件等的碰撞。出錯時會有報警或提示,從而防止了誤操作的發生。
強大的測量功能。可實現基於刀具切削參數零件粗糙度的測量,能夠對仿真軟體上加工完成後的工件進行完全自動的、智慧型化的測量。
具有完善的圖形和標準數據接口。用戶既能在真實的環境中運行虛擬工具機,又能觀察它的各種運行參數,並能將其他CAD/CAM軟體,如UG、Pro/E、Mastercam等產生的三維設計後置處理的NC程式,直接調入加工。
實用靈活的考試系統。可用於遠程網路學習、作業、考試等功能,並實現答卷保存、自動評分、成績查詢和分析等功能,輕鬆實現無紙化的考核與測評。
虛擬數控工具機強大的網路功能,可實現遠程教育。不僅在區域網路上具有雙向互動的教學功能,還具有基於網際網路進行雙向互動的遠程教學功能,數據傳送可以採用衛星、寬頻(ADSL,ISDN,有線CABLE等)或窄帶網際網路(56K Modem)等方式進行。這使得遠程教學成為名副其實,它代表未來教育的發展方向。
2、仿真教學注意事項
仿真教學,做為一種新的教學模式,可給實習教學帶來許多變改和效益,但必須指出的是,仿真實習畢竟不是真正的實際對象的操作,本身有不可替代的局限性。必須注意,採用虛擬數控仿真實習後,可縮短但決不能完全拋開真實的實習過程。這表現在以下幾個方面:
(一)是無論採用物理仿真還是計算機仿真,其原理只是逼近,而不是等同於客觀過程;
(二)是由於數控仿真軟體的在中職教學領域的發展還處於初步階段,仿真水平還有待進一步提高。
(三)是部分數控內容仿真難度大,仿真過程難以達到實習訓練要求。所以,職校引入數控仿真實習,應做為節能降耗的手段,在一定範圍內進行。無論採用虛擬數控仿真輔助實習時間多長,都要給學生安排必須的實際操作實習時間,一方面讓學生掌握實際操作,另一方面也是對虛擬數控仿真實習的檢驗和提高。同時,虛擬數控仿真實習對學生所生成的安全觀念淡簿的影響,只有通過實際操作才能加以糾正。
鑒於虛擬數控工具機具備如此出眾的功能,針對目前各中職學校的數控教學課程和參加數控實習學生人數不斷增加的現實,以及數控工具機精密、昂貴的特點,把數控加工仿真系統軟體引入到教學之中,使之用於數控工具機編程與操作培訓,無疑是個明智之舉。這樣既可以避免因誤操作造成價格昂貴的數控工具機的損壞,又可以使操作人員在對仿真數控工具機操作過程中產生現場感和真實感。同時由於其成本較低,可以大量地配置終端,徹底解決了數控工具機數量不足的難題,使每位學員都能有足夠多的實踐機會,因此能夠讓學生更快地熟悉和了解數控加工的工作過程,掌握各種數控工具機的操作方法。其更大的好處還在於,在實現了同樣培訓效果的情況下,將加工出錯率及事故發生率降低到了最低程度。
關鍵技術
 模擬加工
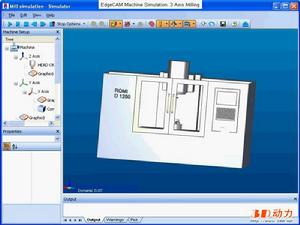
模擬加工隨著機械零件製造複雜程度的提高,對數控代碼正確性驗證的需求越來越迫切,數控仿真系統利用計算機圖形顯示技術模擬實際加工過程,是驗證數控加工程式正確性的有力工具之一。國外已有比較成熟的數控加工仿真系統,如美國的CGTech公司的vericut系統等;國內眾多研究機構也在該方面做了大量的研究工作,推出了比較成熟的數控仿真系統 ,但相比國外同類產品而言,在仿真過程動畫的效果方面仍然存在一定的差距。因此作者在研究過程中,借鑑部分已有成果 對傳統的Z-MAP方法進行改進,設計並實現了一種基於OpenGL的模板快取機制、繪製範圍二次確定的局部繪製算法的三軸數控銑削加工仿真系統。
1、改進的Z-MAP方法
假設刀具平行於z軸,三軸數控銑削加工過程存在兩個明顯的特點:1)只有工件的上表面才是加工表面;2)以工件底平面上任意一點為起點且平行於z軸的一條射線與工件的上表面有且僅有一個交點。
正是在這樣的條件下,將Z-MAP方法套用於三軸數控銑削仿真系統的工件模型的幾何表示才成為可能。
(1)傳統的Z-MAP方法
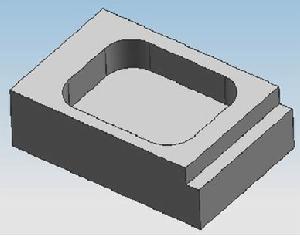
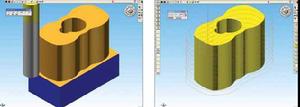
Hsu和Yang[6]提出的Z-MAP方法是一種特殊的基於離散模型的表示方法。該方法的基本思想是將原始的工件模型假定為長方體,將該長方體在XOY平面的投影得到的長方形按照一定精度離散為m×n個均勻分布的正方形格線,從而可以將整個工件模型離散為m×n個以各個正方形為底面的小長方體集合。
在引入Z-MAP方法建立工件的幾何表示後,刀具對工件實際切削過程的幾何表示就被近似表示為離散小長方體高度連續更新(降低)的過程,因此該方法被形象地稱為“割草法”。
(2)改進後的Z-MAP方法
在研究過程中採用了Z-MAP方法建立工件的幾何表示,發現該方法仍然存在著不足。基於Z-MAP方法建立的工件模型僅僅是一系列不同高度的小長方體單元的集合,這樣處理的後果是嚴重破壞了工件模型上表面的幾何連續性,特別是當離散精度較低時,難以表達切削過程中工件上表面的局部曲面特徵。因此作者在傳統的Z-MAP方法的基礎上進行了改進,設計了改進的Z-MAP方法,算法思想如下:
1)在按照一定的離散精度將工件模型的底平面離散為一系列的正方形格線後,以各格線點為起點、工件模型頂面為終點可以得到一系列的z向線段;
2)將所有的z向線段與工件模型上表面的交點按照一定的規則以三角形的形式連線構成的三角形格線面即可被視為工件模型的近似表示。
2、 局部繪製技術
數控仿真過程中工件模型形狀特徵的改變僅在當前切削段的局部區域中,其他場景保持不變,如果僅對當前切削段局部區域進行局部繪製將會極大地減少參與消隱、光照和圖形生成的數據量,並最終提高圖形的刷新速率,獲得每秒至少24幀的動畫顯示效果。
在數控仿真的研究過程中,設計並實現了複雜場景下基於Z-MAP方法的工件模型的局部繪製方法,其基本流程如下:
1)在設備坐標系下確定切削段刀具運動包絡體在螢幕上的顯示區域 Q;
2)世界坐標系下在切削最低平面上初選工件模型的矩形區域F,F是圖形顯示結果和Q發生重疊關係的最小區域;
3)在切削最低平面上精確排除上述矩形區域F中不與Q發生重疊關係的部分區域,並最終精確確定局部區域R;
4)使用模板快取技術在螢幕顯示區域Q中顯示由精選得到的局部繪製區域R。
(1)切削段刀具運動包絡體的確定
世界坐標系中工件模型三角格線面局部繪製範圍的確定過程,從本質上講,是在工件模型空間中尋求可能會被某切削段的刀具運動包絡體所遮擋的最大三角格線範圍;而設備坐標系中圖形局部繪製區域的確定也是尋求某切削段的刀具運動包絡體的最大圖形顯示範圍。精確意義上的刀具運動包絡體的確定需要考慮刀具類型的影響,特別是球頭刀包絡體的組成比較複雜。但在實際確定該模型時,基於以下兩個原因,可對模型的建立進行了適當的簡化處理:1)由於世界坐標系和設備坐標系中所確定的都是最大局部區域或範圍,因此將任何類型的刀具都簡化為長方體模型;2)在實際切削過程中,工件外形的變化僅局限在某一切削段局部範圍內,而且工件上表面是工件外形在高度方向上變化的最大範圍。
根據上述分析,對切削段刀具運動包絡體的確定本質上就是對刀具運動包絡體頂點位置的確定。如圖3-1所示,根據這八個頂點的坐標依次確定刀具運動包絡體的六個表面就確定了該刀具運動包絡體,而刀具運動包絡體的確定是局部繪製算法的基礎。
(2) 世界坐標系中局部繪製區域的確定
世界坐標系中工件模型上表面三角格線面局部繪製區域確定的目的是查找出所有可能被刀具運動包絡體所遮擋的最大範圍。其中ZMIN是指所有切削過程全部結束後工件模型上表面三角格線面頂點中z坐標的最小值,而且工件模型空間中存在這樣一個明確的規律:對於在“切削最低平面”上沒有被刀具運動包絡體所遮擋的三角格線面部分而言,雖然實際情況下該區域的三角格線面往往高於“切削最低平面”,但在這種情況下這些區域也絕對不可能被刀具運動包絡體所遮擋,因此這部分區域在局部繪製時可以不予計算和顯示。
為了確定局部繪製區域,最簡單的方法是依次判斷平行於X(或Y)方向的各條格線線的假想顯示圖形是否和刀具運動包絡體的假想顯示圖形相交,如果相交則精確確定每條格線線上和刀具運動包絡體顯示圖形的相貫區間,所有相貫區間的集合即為局部繪製區域。但是這種方法存在的問題是計算量大、計算效率低。為此作者採用了初選和精選兩個階段來提高計算效率。
(3) 螢幕圖形局部繪製區域的確定
根據得到的刀具運動包絡體,可以確定在螢幕中所改變的區域僅在該刀具運動包絡體範圍內,而在刀具運動包絡體以外的區域將不發生改變,因此作者在研究和實現的過程中使用了OpenGL所提供的模板快取機制來限制螢幕的繪製範圍。
OpenGL所提供的模板快取將繪製限制在螢幕的某些部分進行。模板快取可以保持螢幕上某些部分的圖形不變化,而其他部分仍然可以進行正常的圖形顯示[7]。在三軸數控銑削加工仿真中,局部繪製的區域只可能在當前切削段刀具運動包絡體中,因此將由當前切削段刀具運動包絡體在螢幕上的顯示區域設定為模板。
(4) 局部繪製的完整流程
步驟1:清空模板快取;
步驟2:啟用深度快取和模板快取畫刀具運動包絡體,並且設定顏色快取中的信息為不能修改,不顯示所畫的刀具運動包絡體,但相應的模板快取中的信息設定為1;
步驟3:開啟深度快取,繪製一個遠平面;
步驟4:設定顏色快取為可以寫入,繪製工件模型改變部分。
在數控加工圖形仿真過程中,要使局部重繪區域的圖形有正確的消隱效果,就要將工件模型在螢幕所確定區域的深度信息設定為最大值。OpenGL沒有提供修改局部區域深度信息的功能,因此作者使用繪製遠平面的方法修改由工件模型所確定的包絡體的深度信息。由於該遠平面只是用於修改深度信息的一個媒介,因此不需要顯示在螢幕上。
虛擬切削加工
 模擬加工
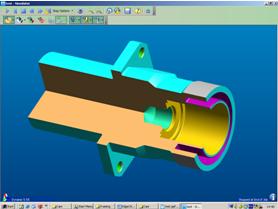
模擬加工虛擬機械加工技術(virtual machining)已誕生很久了,隨著科學技術的進步,三維計算機輔助設計被廣泛套用於產品設計,在工程作業設計、加工工序設計及產品組裝程度等方面,需要開發計算機輔助技術,特別是在計算機輔助工程(CAE)方面,採用有限元法(FEM)來預先解析研究與產品性能相關聯的構造、熱傳導性以及利用計算機輔助製造(CAM)確定刀具運動軌跡的編程技術,均已滲透到工程的各個領域而被有效利用。
切削加工仿真技術的發展動向包括兩個方面,其一是開發NC仿真軟體,藉以顯示刀具運動軌跡,並判斷刀具、刀夾與工件及其夾具是否產生干涉。
在進行立銑加工時,最基本的任務是切除刀具切削刃包絡面通過部分的被加工材料,使保留下來的部分成為已加工面。完成這類加工所用的軟體應包括如下內容:刀具、刀具夾頭、工件、夾具等的協調,工具機主軸的構成及其可工作的範圍,能真實地仿真工具機和刀具的動作等。特別是近幾年來,由於五坐標切削加工的不斷增加,在實際加工前應進行NC仿真的重要性日益突出。這類NC仿真軟體中,有不少軟體具有極為優異的性能,如可從金屬切除體積計算出加工效率;根據金屬切除體積來判斷切削加工是否產生過載;如果負荷固定,由於進給速度過高而產生過載,仿真軟體可調整進給速度,防止過載產生,並可縮短切削加工時間等。
切削加工仿真技術的另一發展動向是研究解析切削加工過程中的物理現象,如被加工材料因塑性變形而產生熱量,被切除材料不斷擦過刀具前刀面形成刀屑後被排出,以及由刀具切削刃切除不需要的材料而在工件上形成已加工面等,並將這一系列切削過程通過計算機模擬出來,目前能達到這種理想目標的產品還為數不多。Third wave systems公司的“advantedge”是採用有限元法對切削加工進行特殊最佳化解析的軟體產品,與用於構造解析的有限元法程式包比較,其最大優點是用戶界面優良,機械加工的技術人員能方便地進行解析。美國scientific forming technologies公司的“deform”是鍛造等塑性變形加工用有限元法解析程式包,最近已被轉用於切削加工。
切削過程是切屑、被加工材料的彈性變形和塑性變形的變形過程,與衝壓、鍛造等塑性變形比較,變形速度(單位時間產生的變形量)非常大,由此產生的塑性變形能量和前刀面上由摩擦產生的能量將引起發熱,從而使溫度大幅度升高,刀尖在連續而狹小的範圍使被加工材料破壞、分離成切屑和已加工面等,這是切削過程的顯著特徵。而這些現象彼此間存在複雜的相互影響。
如果用有限元解析方式,需輸入下列內容:被加工材料特性及摩擦狀態等物理特性;切削條件及刀具形狀等邊界條件。通過有限元解析剛性方程,可輸出切削力、剪下角、切削溫度等帶有切屑生成狀態特徵的量化參數,在此過程中,無需建立數學模型或提出假設。根據有限元解析的結果,還易於將切屑生成過程、應力、變形等物理量實現可視化。
要獲得高精度解析結果,最為重要的輸入內容是反映被加工材料應力——變形關係的材料特性,而材料特性的獲取是極為費力的工作。今後,隨著計算機功率的增大,這種切削過程的物理仿真技術將會逐漸普及。能否迅速普及的關鍵在於能否及時向用戶提供所需的被加工材料的材料特性。
目前,許多科技人員正在進行生產工程中最基礎的切削加工技術的研究,其中多數研究的目的是在弄清楚加工現象的同時,對加工過程進行預測。如果這些研究內容實現了系統的計算機軟體化,就意味著能形成一個切削仿真技術軟體。如東京農工大學機械學院的實驗室就正在進行幾種預測性的有關切削加工仿真技術軟體的研究。工藝流程和實用仿真採用了橫向和縱向相匹配的研究體系,橫向與產品設計到加工工序相對應;在縱向上越往上,實用性越好,往下則不僅是實用性,還包括加工現象的解析和實現可視化。
1、刀具信息資料庫和解析仿真技術並用的切削條件選擇系統
在實際的切削過程中,不應照搬工具廠提供的推薦切削條件,而應根據工具機、工具系統、工件裝卡等具體情況,反覆進行試切削來修正切削條件。同時還應將過去加工中積累的行之有效的參考數據輸入資料庫,在有效利用這些數據的同時,藉助解析方法使切削條件達到最佳化;對於沒有參考數據的新的切削加工,則應開發與此相關的切削條件選擇系統。該系統中把振動、加工精度、刀具升溫、刀具壽命、殘餘應力等設定為解析內容,在解析的基礎上,就能選擇出最佳的刀具和調整切削條件。
本系統的數據大致分為三個部分:刀具信息數據、工具系統組成、切削條件。在切削條件中可積累有效的切削加工技術參數。
擬用圖例表示平頭立銑刀加工的最佳銑削效率和最佳化側面的形狀誤差。根據資料庫選擇所需刀具和刀夾,預測由立銑刀和刀夾的彎曲度及卡頭和主軸錐度結合部分的鏇轉變化所導致的加工誤差。切削力的預測採用刀尖處的切削力乘以比切削抗力的模式。這是一種最簡便的的方法,但卻得到了切削力波形與實測值一致的良好結果。計算出每一瞬間由切削力引起的刀具撓曲量,將其和形成已加工面的切削刃位置的位移相連就能得到已加工面的形狀。與大規模有限元法的計算比較,計算時間是非常少的,輸入刀具信息和切削條件信息,就能容易地仿真加工誤差。
儘管資料庫里已具有確實適應的切削加工條件,人們仍希望進一步減少加工誤差,提高加工效率。實例表明,用這種仿真和實現最佳化方式來修正切削條件是完全可能的。
2、立銑刀加工時的刀具溫度
近年來,高速銑削已很普遍,由經驗得知,它適用於小切深、大進給的銑削條件,而把握最佳條件卻相當困難。銑削加工與車削加工不同,前者屬於斷續切削,在加工過程中,刀具升溫和冷卻高速地反覆進行。由於熱傳導給刀具-切屑接觸部分是斷續進行的,必須根據這一特徵來解析刀具溫度的變化。熱傳導量對預測精度影響很大,但不需要對切屑生成狀態的變形和熱解析相聯繫進行大規模計算,因此可快速獲得解析結果。切削速度、切深、進給的組合將影響最高溫度,當加工效率一定時,提高進給速度,刀具溫度就會降低,溫度降低往往會使進給速度的提高達到極限,而提高進給速度,加工表面就會變得粗糙。因此,如果能很好地平衡粗糙度和溫度的關係,就能夠選擇到兩者相互平衡的切削條件。
3、用有限元法進行切削過程的物理仿真
在用有限元法進行切削過程的物理仿真中,作為切削條件輸入的內容包括:切削速度、切削厚度、刀具前角、刀具后角、工件材料特性等。對這些參數進行解析後,就能獲得切削力、切屑形狀、刀具和切屑上的溫度分布、應力分布、形變分布、殘餘應力分布等物理特性輸出結果。
這種仿真對特殊切削狀態(如動態切削)也是適用的。切削成波形表面的波形切除過程(wave removal)和刀具邊振動邊切削的波形生成過程都顯示出在切屑厚度變薄的過程中,剪下角變小、變形集中而產生大的變形。在這樣的動態切削過程中,剪下角發生變化,與此相對應的是切屑生成的變形範圍大小也發生變化,因此切削力與刀尖的切削厚度不成正比。由與刀尖切削厚度的變動相對應的剪下角度變化圖可知,即使刀尖切削厚度相同,振幅增大時比振幅減小時的剪下角還大,利薩如(lissajou)圖形下方呈凸半月形。根據這樣的解析結果,才能使現象的可視化及理解成為可能,從而開發出更為實用的高精度近似解析法。
另外,對於材料特性不同的複合金屬材料的切削加工,以及象超音波振動切削那樣的刀具在切削方向邊振動邊斷續切削等加工,均可採用物理仿真技術進行解析。由鐵素體和珠光體以層狀分布時的解析實例可知,由於各層分布的位置不同,切屑捲曲的狀態有很大的差異。如果在材料設計中能夠有效套用物理仿真的解析結果,就有可能實現不依靠斷屑槽來進行切屑處理。在超音波振動切削中切削力減小,是因為振動切削的振動頻率大大高於刀具——被加工材料系統固有振動頻率。這種解析所獲得的切削力是斷續作用在刀具和切屑間的力,假設沒有摩擦減小等其它因素的影響,這種切削力和通常的切削是一樣的。
數控車削加工仿真
 車削模擬加工
車削模擬加工傳統的加工仿真方法是通過直觀的圖形顯示來進行數控程式的加工仿真和干涉碰撞檢查,即在計算機上用線框模擬刀具沿刀具路徑在工件上的加工過程。近年來,隨著微型計算機軟硬體技術的不斷發展和成熟,基於實體造型的三維數控仿真技術在工程上的套用日益廣泛,有文獻研究了在虛擬現實環境下,套用多媒體技術進行數控加工仿真的技術。這些新的加工仿真技術的出現使數控程式的加工仿真進人一個新的階段。 本文針對數控車削加工仿真進行了研究並建立了數控車削動態仿真系統。
數控車削加工仿真流程本文設計的數控車削仿真系統既可以對手工編制的單機數控車削程式進行仿真,也可以作為CAD/CAPP/CAM集成製造系統中的一個子系統,對集成製造系統自動產生的數控車削程式進行仿真。該系統可以完成對子程式的處理,允許運動坐標的續效代碼和注釋行的存在,並且支持多種數控代碼格式,是一個通用的數控車削NC 程式仿真系統。
數控車削加工仿真系統包括四個部分:NC代碼詞法和語法分析、刀具加工軌跡仿真、刀具加工過程仿真和刀具加工過程中的干涉碰撞檢查。具體的仿真過程是:首先仿真系統通過對NC程式進行兩次掃描分析,完成對NC程式的編譯解釋和對NC程式的語義分析與坐標變換,此後,生成一個NC坐標信息檔案;其次NC坐標檔案解釋程式從NC坐標信息檔案中讀取加工仿真所需的刀具信息、刀具運動指令及坐標信息,並從刀具庫中讀取相應的加工刀具信息;最後調用相應的加工仿真算法,完成零件的刀具軌跡仿真、加工過程仿真和干涉碰撞檢查等仿真過程。在加工仿真時.既可以進行數控代碼的全過程仿真,也可以進行單工步加工仿真,具有很大的靈活性。
1、NC程式的編譯解釋
(1)NC程式格式
數控程式是由數控指令組成的,一般一條數控指令完成一個操作功能,NC程式是由若干條數控指令按照一定的結構構成的。一個完整的數控加工程式是由若干程式段組成的。常用的程式段格式有:固定順序程式段格式、有分隔設定的固定順序程式段格式和字地址程式段格式。目前常採用字地址程式段格式,國際標準化組織制定了字地址程式段格式ISO-6983-1-1 982標準,其形式為
N… G… X±… Z±… I±… J±… K±… M… S… T… F…
其中G指令、M指令及F、S、T指令代碼描述數控工具機的運動方式、加工類型、主軸狀態、冷卻液的開關、進給速率、主軸轉速的設定和刀具的選擇等。X、Z、I、J、K為坐標指令字,分別描述刀心位置坐標值及加工軌跡中圓弧的圓心坐標等。
(2)NC程式詞法和語法分析
對NC程式解釋編譯是按照數控程式的書寫規則進行的。詞法和語法分析的實質是將NC程式與ISO數控程式標準進行匹配檢查,針對FUNAC數控系統設定了20多條檢查規則,例如:
NC程式有效字元:%,N, G, M, T, F, S, X, Y, Z, I, J, K, R, 0~9, (,), /;
第一行必須是%或注釋行;
G代碼後必須是兩位數字,並且一定是有效代碼.如G00、G01、G02、G50、G92等;
同組G代碼在同一段中不能同時存在,如G01與G02或G03等不能同時出現在同一程式段內;
M代碼後必須是兩位數字,並且一定是有效代碼,如M01、M02、M08等:
T代碼後必須是數字,且符合TXXYY格式,其中XX值不能大於刀庫容量,YY竹值不能大於刀具補償號容量;
S代碼後必須是數字,且必須在主軸轉速範圍之內;
…
(3)NC程式編譯解釋
NC 程式的編譯過程是先建立一個與數控代碼程式段格式相對應的Vbuffer類對象,把此對象作為一個臨時緩衝區,將程式段中的數控加工信息依次讀出,經解釋變換後寫入NC坐標信息檔案中,該檔案是刀具軌跡仿真的驅動數據。系統採用數據緩衝區的方法逐行順序讀人數控代碼,故系統支持坐標字和數控指令字續效代碼的處理。
2、仿真行為
(1)刀具軌跡的動態加工仿真
刀具軌跡動態仿真是根據要進行仿真的數控代碼,在計算機螢幕上動態顯示刀具軌跡,以運動軌跡的方式來直觀顯示零件具體的加工過程;進行刀具軌跡動態仿真時,順序讀入NC坐標信息檔案,獲取數控指令(直線、圓弧指令等)和命令參數(起點、終點和圓心坐標等),然後執行相應的軌跡處理:對於直線和圓弧命令,則要根據其起止運動坐標,進行直線和圓弧的插補運算,得到運動過程中離散的中間點的坐標值,然後動態顯示刀具運動軌跡。刀具運動軌跡仿真算法流程如圖2所示。 為了清楚地表達刀具的軌跡運動過程,仿真畫面將顯示零件毛坯、零件外形輪廓、夾具、起刀點、刀具運動軌跡、退刀點和輔助加工信息等。並用不同的顏色來表示不同的刀具運動軌跡。仿真的優點是可以簡單直觀地檢測刀具運動軌跡的正確性,計算機處理數據較少,顯示速度快,故可獲得很好的動態顯不效果。
(2)零件加工過程動態仿真
為了實時顯示加工刀具的形狀和運動過程,需建立一個刀具切削加工模型。為簡化建模過程,對於車削刀具,將標準(ISO)刀具和非標準刀具統一成標準的切削模型,建立一加工刀庫配置檔案來管理各種刀具的幾何與物理描述數據在進行加工過程仿真時,根據數控代碼中的指令,在刀庫配置檔案中選擇相應的刀具,在夾具資源庫中選擇相應的夾具和夾緊方式,真實地反映加工過程,以觀察刀具和夾具的干涉和碰撞情況。 加工過程動態仿真算法流程和刀具運動軌跡仿真算法流程是一致的,不同的是刀具運動軌跡仿真是用“運動點”來動態顯示刀具軌跡,而加工過程動態仿真算法是用“刀具模型”顯示刀具軌跡,並實時顯示毛坯的去除過程。根據切削加工模型,當刀具處於切削加工運動時,用背景色填充刀具切削部分來進行加工過程仿真:該方法只適用於二維車削的平面仿真情況,與毛坯的形狀無關,亦不需額外的判斷和計算過程,對汁算機的性能要求不高,微機的顯示速度完全可以滿足實時性的要求。
(4)零件加工過程干涉碰撞檢查
二維車削加工干涉碰撞是指,由於數控指令錯誤或刀具參數選擇不當而造成的刀具與工夾具之間及刀具和己加工表面或待加工表面發生干涉碰撞的情況。干涉碰撞檢查算法是,在任一加工時刻,將切削刀具包圍輪廓和靜止件(工具機和夾具等)包圍輪廓作二維布爾運算,如有相交情況,則說明該加工工步位置有碰撞清況發生,需修改加工指令。
具體的干涉碰撞檢查算法,是在插值點將加工刀具的主偏角和副偏角與直線傾斜角度比較,對於圓弧段輪廓,則與該插值點在圓弧輪廓的切線的傾斜角進行比較,並區分順圓和逆圓兩種情況。
零件加工動態模擬仿真可以比較真實地反映出實際的切削加工過程,不僅可檢查數控代碼的正確性,還可以檢查加工過程中刀具與工件、刀具與工具機以及刀具與夾具之間是否有干涉(碰撞或過切)現象,如果仿真過程中發現刀具軌跡錯誤或有干涉現象產生,可以馬上停止,並對加工程式實施修正,保證了加工質量。
