
概述
 荊輪機構
荊輪機構工作原理
 外嚙合式棘輪機構
外嚙合式棘輪機構分類方式
按結構形式
 齒式棘輪機構
齒式棘輪機構分為齒式棘輪機構和摩擦式棘輪機構
齒式棘輪機構結構簡單,製造方便;動與停的時間比可通過選擇合適的驅動機構實現。該機構的缺點是動程只能作有級調節;噪音、衝擊和磨損較大,故不宜用於高速。
摩擦式棘輪機構是用偏心扇形楔塊代替齒式棘輪機構中的棘爪,以無齒摩擦代替棘輪。特點是傳動平穩、無噪音;動程可無級調節。但因靠摩擦力傳動,會出現打滑現象,雖然可起到安全保護作用,但是傳動精度不高。適用於低速輕載的場合。
按嚙合方式
 內嚙合棘輪機構
內嚙合棘輪機構分外嚙合棘輪機構和內嚙合棘輪機構
外嚙合式棘輪機構的棘爪或楔塊均安裝在棘輪的外部,而內嚙合棘輪機構的棘爪或楔塊均在棘輪內部。外嚙合式棘輪機構由於加工、安裝和維修方便,套用較廣。內嚙合棘輪機構的特點是結構緊湊,外形尺寸小。
按從動件運動形式
分單動式棘輪機構、雙動式棘輪機構和雙向式棘輪機構
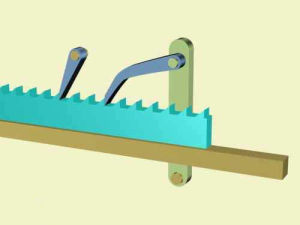
單動式式棘輪機構當主動件按某一個方向擺動時,才能推動棘輪轉動。雙動式棘輪機構,在主動搖桿向兩個方向往復擺動的過程中,分別帶動兩個棘爪,兩次推動棘輪轉動。
雙動式棘輪機構常用於載荷較大,棘輪尺寸受限,齒數較少,而主動擺桿的擺角小於棘輪齒距的場合。
雙動式棘輪機構
以上介紹的棘輪機構,都只能按一個方向作單向間歇運動。雙向式棘輪機構可通過改變棘爪的擺動方向,實現棘輪兩個方向的轉動。
套用
棘輪機構的主要用途有:間歇送進、制動和超越等,以下是套用實例。
間歇送進
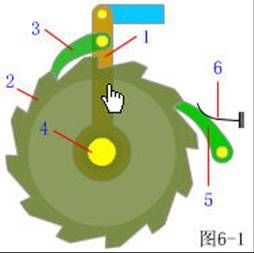
牛頭刨床,為了切削工件,刨刀需作連續往復直線運動,工作檯作間歇移動。當曲柄1轉動時,經連桿2帶動搖桿5作往復擺動;搖桿5上裝有雙向棘輪機構的棘爪3,棘輪4與絲槓6固連,棘爪帶動棘輪作單方向間歇轉動,從而使螺母(即工作檯)作間歇進給運動。若改變驅動棘爪的擺角,可以調節進給量;改變驅動棘爪的位置(繞自身軸線轉過180°後固定),可改變進給運動的方向。
制動
為槓桿控制的帶式制動器,制動輪與外棘輪2固結,棘爪3鉸接於制動輪4上A點,制動輪上圍繞著由槓桿5控制的鋼帶6。制動輪4按逆時針方向自由轉動,棘爪3在棘輪齒背上滑動,若該輪向相反方向轉動,則4輪被被制動。
超越
棘輪機構可以用來實現快速超越運動。運動由蝸桿傳到蝸輪,通過安裝在蝸輪上的棘爪3驅動棘輪固連的輸出軸5按圖示方向慢速轉動。當需要軸快速轉動時,可按輸出軸的方向快速轉動輸出軸上的手柄,這時由於手動轉速大於蝸輪轉速,所以棘爪在棘輪齒背滑過,從而在蝸輪繼續轉動時,可用快速手動來實現輸出軸超越蝸輪的運動。
設計要點
棘輪機構的設計主要應考慮:棘輪齒形的選擇、模數齒數的確定、齒面傾斜角的確定、行程和動停比的調節方法
現以齒式棘輪機構為例,說明其設計方法
棘輪齒形的選擇
常用齒形,不對稱梯形用於承受載荷較大的場合;當棘輪機構承受的載荷較小時,可採用三角形或圓弧形齒形;矩形和對稱梯形用於雙向式棘輪機構。
模數、齒數的確定
與齒輪相同,棘輪輪齒的有關尺寸也用模數m作為計算的基本參數,但棘輪的標準模數要按棘輪的頂圓直徑da來計算。
m=da/z
棘輪齒數z一般由棘輪機構的使用條件和運動要求選定。對於一般進給和分度所用的棘輪機構,可根據所要求的棘輪最小轉角來確定棘輪的齒數(z≤250,一般取z=8~30),然後選定模數。
齒面傾斜角的確定
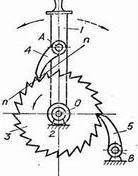
棘輪齒面與徑向線所夾α稱為齒面傾斜角。棘爪軸心O1與輪齒頂點A的連線O1A與過A點的齒面法線nn的夾角β稱為棘爪軸心位置角。
為使棘爪在推動棘輪的過程中始終緊壓齒面滑向齒根部,應滿足棘齒對棘爪的法向反作用力N對O1軸的力矩大於摩擦力Ff沿齒面)對O1軸的力矩,即
N·O1Asinβ>Ff·O1Acosβ
則Ff/N
因為f=tan=Ff/N
所以tanβ>tan
即β>
式中f和分別為棘爪與棘輪齒面間的摩擦係數和摩擦角,一般f取0.13~0.2。
行程和動停比的調節方法
1)採用棘輪罩
通過改變棘輪罩的位置,使部分行程棘爪沿棘輪罩表面滑過,從而實現棘輪轉角大小的調整。
2)改變擺桿擺角
通過調節曲柄搖桿機構中曲柄的長度,改變搖桿擺角的大小,從而實現棘輪機構轉角大小的調整。
3)採用多爪棘輪機構
要使棘輪每次轉動的角度小於一個輪齒所對應的中心角γ時,可採用棘爪數為m的多爪棘輪機構。
如n=3的棘輪機構,三棘爪位置依次錯開γ/3,當擺桿轉角Ф1在γ≥Ф1≥γ/3範圍內變化時,三棘爪依次落入齒槽,推動棘輪轉動相應角度Ф2為γ≥Ф2≥γ/3範圍內γ/3整數倍。
