
概念
空間為移動的,轉換為時間則為時間則為時間的移動或時間的變動;空間上移動的快慢,轉換為時間則指時間上頻率的快慢;空間為靜止的,則以靜止的點位坐標,或轉換成時間上已完成,或轉換為時間上將要完成。
基於時空轉換的精密位移測量新方法
文獻中提出的“時空坐標轉換”和“時柵位移感測器”,體現了“用時間測量空間”的基本思想,以圖改變傳統的精密位移測量方法和感測器總是依賴於精密刻劃加工的傳統思路,改由更廉價、手段更多樣化的時間量來精密測量位移。在研製過程中一個敏感的問題是:這種方法與傳統的比相方法尤其是利用時鐘脈衝插補的比相方法是一回事嗎?
傳統的精密位移測量方法
(1)非調製方法
典型感測器為光柵,其求取位移的數學模型為:x=∫vdt=∫(dx/dt)dt=∫dx=∑Δx=∑W=W∑P
上式說明,由於運動物體的運動速度v是非解析的(可能是快慢不定、忽動忽停、正反變向等),積分無法完成,於是變通為求微位移dx來完成。各種柵式感測器如光柵等,就是通過製造微位移Δx(即柵距W),再經光電轉換成為電脈衝P,利用計數電路累加微位移而得到總位移x。為此需要W儘量細微,且每一個W都要精確。
(2)調製方法
典型感測器為感應同步器,其電信號表達式為:u=Asin(K+Δh)=Asin(K+(2π/W)x)
它表明相位角Δh在1個節距W內與動尺和定尺的相對位移x有一一對應關係,每經過1個節距,變化1個周期2π,而與速度無關。通過2路信號的相位比較,得到相位之差,再換算出位移量。
文獻還介紹了另一種工作於調製方法的感測器——齒柵的原理,以及用2列火車的“思想實驗”所作的推導。這可視為以運動的方法將非調製式感測器用於調製工作方式,數學模型與公式是一樣的,文獻將其分別稱之為“動激型”和“電激型”,並且將這個典型的行波表達式推導成為:
u=Asin(K+(2π/W)x)=Asin(2πft+(2π/W)x)=Asin2π(t/T+x/W)
此式說明3點:
①式中的時間t和空間x處於完全對等的關係,時間以固定的T為周期,空間x以固定的節距W為周期。
②相位是沒有量綱的,因此上式可以任意認為2項中的一項為變化的相位,另一項為固定的初相位,即t或x都可作為自變數。“時空轉換”由此而起。
③動激型調製感測器以固定的空間W劃分再以恆速V運動,產生出的電信號u具有固定的時間周期T,T=W/V;電激型調製感測器以固定的空間W劃分再通以固定時間周期T的電信號,產生恆速運動的行波,行進速度為恆速V,V=W/T。
如果再把式中的x=∫vdt帶入,則公式涵蓋了調製式與非調製式原理,時間T、t和空間W、x勻速運動V和變速運動v,機械運動和電信號等諸多具有對偶關係的變數,由此構成所提出的“運動坐標系”,引出了下面的討論。
時柵位移感測器原理
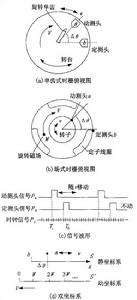 圖1 時柵原理圖
圖1 時柵原理圖按照時空坐標轉換思想:“建立相對勻速運動雙坐標系,則一 個坐標繫上的位置之差(位移)表現為另一個坐標繫上觀察到的時間之差”,文獻分別提出了“單齒式時柵”和“場式時柵”的構建原理如圖1所示。它們是一種“對偶”的關係,電信號波形圖是一樣的。
圖1(a)以電機帶動的恆速V單齒作為運動坐標系,節距W=360°。其缺點在於旋轉機械引起的振動和非勻速性,以及體積大和安裝不便,尤其是不能測直線位移。圖1(b)根據電機原理,由空間互差120°的三相繞組配合時間互差120°的三相電流產生的恆速V旋轉磁場M為運動坐標系,勻速性大大改善,體積縮小,安裝方便,且根據直線電機原理,直線位移也一樣能測。從圖1(d)容易看出,無論靜坐標繫上的運動質點a(動測頭)以何種變速度v運動(快慢、動停、正反轉等),只要有相對於坐標原點b(定測頭)的位移,就會被動坐標繫上的間距為W的觀察點(單齒或運動磁場的過0點)反覆採樣確定,Δθ=V(T-T),即位置差等於時間差與恆定因子V的乘積。
時柵與傳統的感測器原理比較
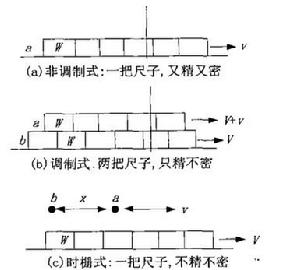 圖2 三種測量位移方法的思想實驗
圖2 三種測量位移方法的思想實驗從圖1(c)電信號處理的角度看,求T和T的時間差,也 就是求P和P信號的相位差,因此時柵的時間比較方法與調製式感測器的比相方法非常相似,尤其是當調製式感測器比相採用時鐘脈衝來插補時,簡直就是一回事。這是不是意味著同樣的原理換了一種說法呢?
圖2仍借用文獻中虛構的火車的例子說明上述3種方法的區別。
圖2(a)用大地標誌桿記錄火車通過的邊沿數,累加值就是總位移,這就是以光柵為代表的非調製式感測器測量原理,x=∑W,因此要求W儘量小,以滿足解析度要求,而用累加滿足大量程測量要求。特點是:測量與速度v無關,(或者說與時間無關),與刻劃精度緊密相關,每個W必須一樣。可概括為“一把尺子,既要密,又要精。”
圖2(b)2列火車代表動尺和定尺,測量的位移是a相對於b的位移,而不是相對於大地的位移。這是對以感應同步器為代表的電激型調製式位移感測器原理的一種抽象和解釋,而對以齒柵為代表的動激型調製式感測器就更形象一些,容易理解一些,標誌桿不是對火車邊沿記數,而是分別記錄2列火車的邊沿到達標誌桿的時間T和T。只要a、b火車有相對位移,T和T之差ΔT就會發生變化,這種變化是以“比相”的方式求出的,可以用解析度很高的時鐘脈衝插補來實現,因此不需要W很小也可以滿足解析度要求,但必須保持W一致。可以構想,如果W不一致,本來a、b沒有相對位移,由於ΔW的存在,測出ΔT發生變化,就以為發生了位移,也就是產生了誤差。調製式感測器如感應同步器、旋轉變壓器的W都比較大,但刻劃精度要求很高,是制約其精度和成本的主要因素。這種原理可概括為“兩把尺子,不要密,但要精”。
圖2(c)即圖1(d)的原理。對於時柵來說,首先,它不要2列火車,就是說不要動、定2把尺子,也就談不上相位“比較”即“比相”,換言之,時柵絕不是比相,而是只要一把尺子進行“掃描”的一種概念:運動坐標繫上的每一個節點(觀察者序列)不斷對參考點b和運動質點a進行掃描採樣得到Ti和T02組時間序列,只要有位移x,就會從T和T的時間差上反映出來。這就是文獻提出的所謂時空坐標轉換理論,其核心思想及其內涵可以概括為3句話:
(1)建立帶時間考察點的相對勻速運動雙坐標系,則一個坐標繫上的位置之差(位移),表現為另一個坐標繫上觀察到的時間之差,即x=V(T-T)。
(2)通過建立勻速運動坐標系,把對被測物體的勻速要求,轉化為對感測器的勻速要求,使得用時間測變速運動物體的位移空間成為可能。
(3)在一個勻速運動坐標系中,時間(時鐘脈衝)具有了惟一的空間當量,就是V。
其次,這種方法不要求採樣節點序列均勻分布,節距W一致也好,不一致也好,不引入刻劃誤差。若W保持一致,採得的是連續的位移曲線x(t)上的一組離散的點;若W不一致,採得的是x(t)上的另一組離散的點,它們都能反映x(t)的變化規律,不存在由採樣方法和刻線尺的刻劃誤差而引起的測量誤差,這是時柵與傳統測量方法最大的區別和優勢。並且只要提高V,就可以滿足任何採樣頻率的要求。因此,這種原理可以概括為“一把尺子,既不要密,也不要精”。
時空坐標轉換方法與比相方法的另一個本質區別在於對刻線尺的運動速度要求。時柵感測器不要求尺子刻線精和密,但要求尺子運動速度V必須恆定,即是把對感測器的機械問題,轉化成為電氣問題(而研製者認為人類解決基於時間的電氣問題的手段比解決基於空間的機械問題的手段要多得多、先進得多)。而比相方法則不一定。如果是感測器內的2把尺子在比相,它也必須保持V恆定。文獻中的齒柵就要求電機轉速恆定;而對感應同步器來說,雖然沒有看得見的轉動,卻有恆定的節距W和周期T,也就有一個廣義的恆定速度或者行波速度V=W/T。但是如果用2把圖2(a)的尺子來進行比相,最典型的例子就是工具機傳動鏈2端的傳動誤差的測量,那是一種“同步位移比較”的概念,並不要求運動速度恆定。例如無論工具機(如滾齒機)電機運動速度恆定與否,對傳動鏈2端的運動進行比相式測量,即可測出工具機傳動誤差。可概括為“時柵要求尺子恆速,比相則有時恆速,有時不恆速”。
綜上所述,從理論層面上說,時空坐標轉換方法是對傳統調製式位移測量方法的一種沿續和提高。一方面它可以用“以時間測空間”的思想解釋任何一種調製式感測器,從而從新的角度賦予其新的內涵。另一方面,它可以在此思想的指導下,發明設計出各種全新的更先進的感測器。從技術層面上說,時柵位移感測器因為徹底摒棄了以精細刻劃為代表的精密機械加工而具有重要實用價值。一方面其生產成本可以大大降低而具有商品化競爭力,另一方面因不在乎生產現場的碰撞、油污的干擾而使感測器不僅可作為計量基準,也可作為生產基準,“價格低廉,使用隨意”,這正是人們對精密位移測量手段的永恆追求。
