介紹
數字控制的過程為便於編寫程式,數字控制器往往通過差分方程來實現。
 數字PI控制
數字PI控制 數字PI控制
數字PI控制 數字PI控制
數字PI控制令,,當採樣頻率足夠高時,可以近似認為:有.
 數字PI控制
數字PI控制當時,
 數字PI控制
數字PI控制 數字PI控制
數字PI控制 數字PI控制
數字PI控制 數字PI控制
數字PI控制 數字PI控制
數字PI控制有≈
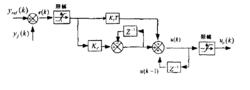 圖2數字PI控制器的結構框圖
圖2數字PI控制器的結構框圖 數字PI控制
數字PI控制則當時有
 數字PI控制 數字PI控制 數字PI控制 數字PI控制 數字PI控制
數字PI控制 數字PI控制 數字PI控制 數字PI控制 數字PI控制=
則向後差分方程為
 數字PI控制 數字PI控制 數字PI控制 數字PI控制
數字PI控制 數字PI控制 數字PI控制 數字PI控制 數字PI控制
數字PI控制 數字PI控制
數字PI控制 數字PI控制 數字PI控制 數字PI控制
數字PI控制 數字PI控制 數字PI控制(T)
 數字PI控制 數字PI控制 數字PI控制 數字PI控制
數字PI控制 數字PI控制 數字PI控制 數字PI控制 數字PI控制 數字PI控制
數字PI控制 數字PI控制又=,可簡寫成
數字PI控制 數字PI控制 數字PI控制 數字PI控制 數字PI控制 數字PI控制 數字PI控制
數字PI控制 數字PI控制 數字PI控制 數字PI控制 數字PI控制系式。
以數字PI控制器為例,畫出結構框圖如圖2所示。
設計方法
數字PI控制 數字PI控制設計數字PI控制器,就是要確定其係數
、由於採樣周期是固定的,常見的數字設計方法有模擬設計法和z域設計法。模擬設計法是先設計出模擬PI控制器D(s),再經差分變換或雙線性變換導出對應的D(z)。這種設計方法能利用模擬控制器的設計經驗,但存在一定的近似性和不確定性。Z域設計法的步驟是:首先,將被控對象按零階保持器法(即串聯一個零階保持器)進行離散化;然後,根據系統的性能指標要求,直接在Z域中進行零、極點配置或回響分析,一般可按先比例(P)、後比例積分(PI)的順序確定控制器參數。控制器的設計一直是控制系統的關鍵,其主要性能如動態特性和穩壓精度與控制器的參數密切相關。在數字控制系統中,數字控制器具有其特有的特徵。
相對於模擬控制器而言,受採樣精度和採樣頻率的限制,由於數字控制器的頻寬有限,從理論上來講,數字控制器的控制效果應該與模擬控制器有一定的差距。但是,數字控制器具有結構靈活,邏輯判斷和可以進行複雜的人工智慧判斷等優點,因而在控制性能上能趕上或超過模擬控制器 。
