
原理
 慣性制導
慣性制導定義
利用慣性來控制和導引運動物體駛向目標的制導系統。這種系統通過慣性測量裝置測出物體的運動參數,形成制導指令進行控制。組成慣性制導系統的設備都安裝在運動物體上,工作時不依賴外界信息,也不向外輻射能量,不易受到干擾,是一種自主式的制導系統。這種系統廣泛用於飛機、船舶、飛彈、運載火箭和太空飛行器的制導。
組成
慣性制導系統通常由慣性測量裝置、計算機、控制或顯示器等組成。慣性測量裝置包括測量角運動參數的陀螺儀和測量平移運動加速度的加速度計。計算機對所測得的數據進行運算,獲得運動物體的速度和位置。對於飛機和船舶來說,這些數據送到控制顯示器顯示,然後由領航員或駕駛員下達控制指令,操縱飛機、船舶航行;或由自動駕駛儀引導到達目標。太空飛行器和飛彈的計算機所發出的控制指令,則直接送到執行機構控制其姿態,或者控制發動機推力的方向、大小和作用時間,將太空飛行器引導到規定的軌道上,將飛彈引導到目標區內。
分類
 慣性制導
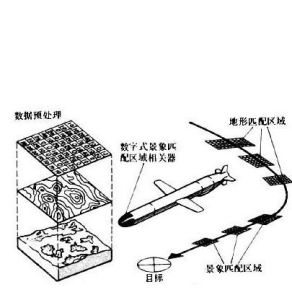
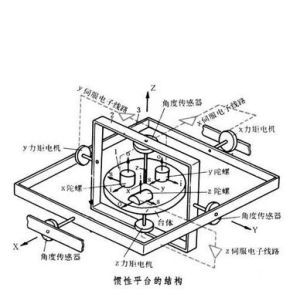
慣性制導① 平台式慣性制導系統 測量裝置裝在慣性平台的台體上,平台則裝在運動物體上。按所建立坐標系的不同,它又分為空間穩定平台式慣性制導系統和本地水平平台式慣性制導系統。前者的台體相對於慣性空間是穩定的,用以建立慣性坐標系。它受地球自轉和重力加速度的影響,需要補償,多用於運載火箭和太空飛行器;後者台體上的加速度計輸入軸所構成的基準平面能始終跟蹤運動物體所在的水面,因此加速度計不受重力加速度的影響。這種系統多用於沿地球表面作接近等速運動的運動物體,如飛機、巡航飛彈等。慣性平台能隔離運動物體角運動對測量裝置的影響,因此測量裝置的工作條件較好,並能直接測到所需要的運動參數,計算量小,容易補償和修正儀表的輸出,但重量和尺寸較大。
② 捷聯式慣性制導系統 陀螺儀和加速度計直接裝在運動物體上。這種系統又分為位置捷聯和速率捷聯兩種類型。位置捷聯慣性制導系統採用自由陀螺儀,輸出角位移信號;速率捷聯慣性制導系統採用速率陀螺儀作為敏感元件,輸出瞬時平均角速度向量信號。由於敏感元件直接裝在運動物體上,振動較大,工作的環境條件較差並受其角運動的影響,必須通過計算機計算才能獲得所需要的運動參數。這種系統對計算機的容量和運算速度要求較高,但整個系統的重量和尺寸較小。
慣性測量裝置
慣性測量裝置按照儀表的組合方式,分為平台式和捷聯式。平台式慣性測量裝置,是利用陀螺儀將平台穩定於慣性空間,加速度表組合固連在平台上。在制導過程中,加速度表組合與慣性參考系間的角度關係保持不變,因而導航計算簡單。平台隔離彈體的角運動和振動,能使加速度表在較好的環境裡工作,並具有初始對準容易實現等優點。因此,平台式慣性測量裝置為地地彈道飛彈所廣泛採用。捷聯式慣性測量裝置,是將加速度表組合固連在彈體上,因而加速度表組合與慣性參考系間的角度隨彈體姿態變化而變化。採用陀螺儀作為角位移或角速度感測器,測出或算出加速度表組合相對慣性參考系的角度,再用計算機將加速度表組合的測量值轉換到慣性參考系。捷聯式導航計算較複雜,儀表受彈體振動影響較大,但具有設備簡單、可靠性高、採用冗餘技術容易等優點。因此,隨著微型計算機的發展,越來越受到重視。
優點
 陀螺儀
陀螺儀慣性制導的最大優點是不受無線電干擾,因而為世界各國彈道飛彈所採用。彈道飛彈慣性制導,按導引規律和關機條件,可分為攝動制導和閉路制導。攝動制導亦稱開路制導,是指飛彈在整個主動段按照固定的時間程式控制飛行,由於飛彈結構偏差和外部干擾等因素的作用,使飛彈偏離預定的標準彈道,需要通過導引使其偏差限制在小偏差範圍內。飛彈的落點偏差(射程偏差、橫向偏差),可分別寫成關機點參數偏差的台勞級數。由於射程偏差隨時間的變化率,遠遠大於橫向偏差隨時間的變化率,故取“射程偏差為零”作為關機條件而導出關機方程;取“落點橫向偏差最小”和“關機點參數偏差最小”作為導引的性能指標導出導引方程,通過計算分別給出導引指令和關機指令。攝動制導具有計算簡單、實現容易等優點,但當干擾大時,制導誤差增大。閉路制導是一種狀態反饋最優制導,飛彈在大氣層內按固定程式控制,出大氣層開始閉路導引,它是由目標的位置和飛彈的實時狀態(位置和速度),通過解析計算形成最優姿態控制指令,並連續地傳給執行機構而實現導引的。計算機連續進行計算,當飛彈的實際速度達到能命中目標所需要的速度時,發出關機指令。閉路制導不依賴於標準彈道,而且精度高,射擊諸元計算簡單,它適用於機動發射飛彈和多彈頭分導,但彈上計算複雜。
影響採用慣性制導的彈道飛彈命中精度的主要因素是慣性儀表誤差,要提高命中精度,首先須不斷改善和提高儀表的精度,並對其系統誤差進行修正。同時還須不斷完善制導方案,在系統設計上儘量採用冗餘技術,並利用天文、地形地圖匹配等外界信息來提高制導精度。
部件之陀螺儀
 陀螺儀
陀螺儀陀螺儀已成為現代兵器慣性制導系統中的核心部件. 在希臘文中,“陀螺”一詞的原意為“鏇轉指示器”。在現代科學技術中,不論基於何種原理,凡能感測鏇轉狀態的任何裝置,一般都可稱之為陀螺儀。關於陀螺運動的基礎理論研究大約是從18 世紀開始的。早期採用的是根據迴轉儀原理設計的機械陀螺,後來出現了機電式慣性陀螺。在第一次世界大戰中,美國海軍首先研製成功陀螺導航儀,並相繼推廣套用於航海和航空事業中。20 世紀初出現了飛機陀螺穩定器和自動駕駛儀。近年來,隨著光電技術的迅猛發展,集光、機、電一體化的光電慣性陀螺及利用光電技術加工的新型慣性陀螺(如雷射陀螺、光纖陀螺、半球諧振陀螺、石英音叉陀螺等) ,正不斷地發展並廣泛套用于軍事領域。
1、機械慣性陀螺
坦克、裝甲等戰車上的鐵制物和電磁系統較多,通常指南針
會受到影響因而難以發揮作用。如果在車輛開始行進時, 將陀螺儀的高速轉軸放置在南北方向,則由於陀螺儀的定軸性,在車輛行進過程中,無論車身如何轉動,陀螺儀的高速轉軸都會穩定地指向當地的南北方向。車輛的縱軸與陀螺儀高速轉軸的夾角即為航向角,根據其大小即可確定方向,並通過電子系統控制車輛的前進。前蘇聯最早即在自行高炮和薩姆飛彈的發射車上裝置了陀螺儀。對於空中的飛行器(如飛機、火箭、飛彈等) ,飛行過程中的方向和姿態可以用三個角度來描述:飛行器頭部的上仰下俯(即飛行器繞垂直於飛行方向的水平軸的鏇轉), 可用俯仰角來表示;飛行器頭部左右的擺動(即繞鉛直軸的轉動),可用偏航角來表示;飛行器繞其本身縱向軸線的轉動,可用側滾角來表示。測出這三個角度至少要用兩個陀螺儀,即繞鉛直和水平軸轉動的兩個陀螺儀。 由於高速轉子的定軸性,無論飛行器如何運動,兩軸線的方向都保持不變,因此兩軸線可分別作為鉛直和水平基準線。上述三個角度可分別通過陀螺儀的內、外框架與相應軸線、基座之間的夾角測得. 例如飛行器的側滾角和俯仰角可根據以鉛直基準線為轉軸的陀螺儀測出,偏航角可以根據以水平基準線為轉軸的陀螺儀
測出,將測出的信號傳送給計算機系統,就能發出指令,隨時糾正飛行器飛行的方向和姿態。
2、滾動和俯仰陀螺
慣性制導系統分為捷聯式慣性制導和平台式慣性制導兩種:把慣性儀表直接安裝在飛行器內部的某個位置,並且隨著飛行器一起運動的稱為捷聯式。
3、偏航和俯仰陀螺
慣性系統;平台式慣性系統是在飛行器內將一個金屬平台固定在高質量的常平架上,當飛行器俯仰或偏航時,陀螺和伺服控制系統使穩定平台總是保持在原有的空間方位上。 由於捷聯式慣性制導是將信號直接輸入計算機,因而能降低造價,提高可靠性,故目前的慣性系統多採用捷聯式慣性制導。 而對於導航精度要求較高的武器系統(如運載火箭、發射彈道飛彈的核潛艇、洲際飛彈、巡航飛彈等) ,常套用陀螺平台慣性系統。
