
功能
恆星敏感器(簡稱星敏感器)是當前廣泛套用的天體敏感器,它是天文導航系統中一個很重要的組成部分。
它以恆星作為姿態測量的參考源,可輸出恆星在星敏感器坐標下的矢量方向,為太空飛行器的姿態控制和天文導航提供高精度測量數據。
特點
恆星敏感器的主要特點如下:
精度高
由於恆星的張角很小(如天狼星張角是0.006 8”),即使張角很大的心宿二,其張角也只有0.04”,可以認為是點光源目標,而且具有高精度的位置穩定性,因此它的測姿精度可以很高,中等精度的恆星敏感器精度達10”左右,高精度星敏感器可達1”或更高。
信號弱
恆星光是弱光,零等星(視星等)的照度只有2.1×10 lx左右,所以雜散光干擾是一個嚴重問題。
需要恆星識別
恆星數量非常大,亮於視星等+6等的恆星全天球有5 000多顆,不像太陽、月球、地球,作為參考天體都只有一個,必須進行恆星識別,而且要接近於實時識別,這是恆星敏感器的技術難點之一。
提供三軸信號
只要能測到兩顆以上(包括兩顆)的恆星數據即可,但為保證精度,常在一個太空飛行器上裝兩個恆星敏感器,其敏感軸的夾角最好為90°(此時誤差最小)。
分類
各種類型恆星敏感器的出現與衛星姿控系統的發展、探測器的發展以及恆星敏感器本身的發展密切相關,它們出現在不同的歷史時期。最早期的是機械跟蹤式星敏感器;後來是適用於自旋穩定衛星的穿越式星敏感器;隨著三軸穩定衛星的發展與成熟,廣泛套用的是固定探頭式星敏感器。下面分別簡單介紹這三種星敏感器。
機械跟蹤式星敏感器
 恆星敏感器
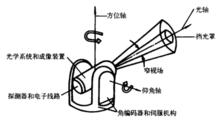
恆星敏感器機械跟蹤式星敏感器包括光學系統、成像裝置、探測器、電子線路、兩自由度框架、角編碼器和伺服機構等。
工作原理:目標星通過光學系統、成像裝置(如調製盤)在探測器上成像,配以合適的電子線路,檢測出星像在瞬時視場中的方位和大小,並驅動伺服機構使框架轉動,將目標星的圖像保持在瞬時視場中心。根據目標星的識別和框架轉角的大小和方向,從而確定衛星的姿態。
主要特點:瞬時視場小,而跟蹤視場大;利用框架運動擴展了跟蹤視場,但引入了機械可動部件,可靠性較低;只可跟蹤一顆星。
穿越式星敏感器
 恆星敏感器
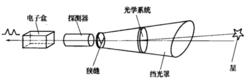
恆星敏感器穿越式星敏感器包括光學系統、成像裝置(如狹縫)、探測器和電子線路等。它的結構簡圖見右圖。
工作原理:穿越式恆星敏感器常用在自旋衛星上,隨著衛星的自旋,使敏感器對天球掃描。當恆星穿過它的狹縫視場時,該恆星就被探測器敏感出來,配以合適的電子線路,檢測出恆星穿越的時間和信號的幅度。根據對該恆星的預測、識別和電子線路給出的信息,可用於確定姿態。
主要特點:具有幾個不平行的扇形視場,姿態信息包含在穿越時刻中;它簡單、沒有機械可動部件,可靠性較高,但掃描角速度過低時信噪比會大大降低。
發展歷史
20世紀40年代末及50年代初已研製出飛機和飛彈制導用的星跟蹤器,它為測量系統提供的天體基準晝夜都能用,精度超過了太陽敏感器。
20世紀60年代中,星跟蹤器套用於衛星及其他飛行器,絕大部分採用光電倍增管作探測器,用機械方法調製星光,用框架擴展視場。後來,有相當長時間採用光導攝像管、析像管作為探測器,這就取消了運動部件,從而增加了平均無故障時間。
20世紀70年代初電荷耦合器件(CCD)問世。由於它的明顯優點:不需要提供高壓、像元尺寸及位置固定和對磁場不敏感等,各國及有關廠家紛紛轉向研製CCD恆星敏感器,發展異常迅速。到90年代中,已發展了第二代CCD恆星敏感器。
星敏感器按其發展階段可分為星掃描器、框架式星跟蹤器和固定敏感頭星敏感器三種類型。
(1)星掃描器又稱星圖儀。它帶有一狹縫視場,適用於自轉衛星。其原理是衛星自轉時,敏感器掃描天區,狹縫視場敏感恆星,處理電路檢測恆星掃過的時間和敏感的星光能量,並根據先驗知識、匹配識別等,可測出衛星的姿態。它沒有旋動部件,可靠性較高,但由於系統信噪比低,在工程實用中受到嚴重的限制,現已基本淘汰。
(2)框架式星跟蹤器。其原理是導航星通過光學成像系統在敏感面上成像,處理電路檢測出星像在視場中的位置及大小,根據檢測結果驅動伺服機構使機械框架轉動,將導航星的圖像儘可能保持在視場中心。最後根據識別星的信息和框架轉角情況,來確定太空飛行器的姿態。此種類型的星敏感器結構複雜,可靠性較差。
(3)固定敏感頭星敏感器。其類似星掃描器,不過它沒有成像裝置。其原理是通過光學系統由光電轉換器件敏感恆星,處理電路掃描搜尋視場,來獲取、識別導航星,進而確定太空飛行器的姿態。這種類型的星敏感器視場呈錐形,易於確定星像的方位,且沒有機械可動部件,因而可靠性高,具有廣泛的套用前景,目前固定敏感頭的CCD星敏感器因其像質好、解析度高、技術發展比較成熟等已在工程上得到了廣泛的套用。新型固定敏感頭的CMOSAPS星敏感器,由於具有集成度高、不需電荷轉換、動態範圍大等特點,是星敏感器發展的方向。
