
定義
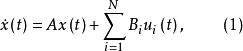
考慮一個具有N個局部控制站的大規模線性時不變系統:
 固定模
固定模 固定模
固定模 固定模
固定模 固定模
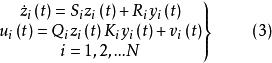
固定模式中:分別表示為系統狀態向量,第控制站的輸入向量和輸出向量。其原始系統的控制和輸出階次為m和 r ,由以下(3)給定
 固定模
固定模 固定模
固定模 固定模
固定模和是具有相應階次的實常數矩陣。
分散鎮定問題就是要找出N個具有動態補償器的局部輸出控制規律:
 固定模
固定模 固定模
固定模 固定模
固定模 固定模
固定模 固定模 固定模
固定模 固定模 固定模
固定模使整個系統穩定。式中是第 i 個補償器的輸出向量,是 i 控制器外部輸入向量, 矩陣分別為。或者說,分散輸出鎮定是要決定,使得由(1)和(2)所描述的閉環系統其極點在複平面預定的集合之中。
 固定模
固定模 固定模
固定模 固定模
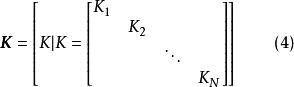
固定模定義1 考慮由(1)和(2)所描述的系統及整數。令的增益矩陣K代表下述對角方塊矩陣集合中的矩陣:
 固定模
固定模 固定模 固定模
固定模 固定模 固定模
固定模 固定模
固定模 固定模
固定模這裡。那么系統對於 K的“固定多項式”就是對所有,多項式集合的最大公共因子,並用下式表示:
 固定模 固定模 固定模
固定模 固定模 固定模 固定模
固定模定義2 對系統和由(4)所給定的輸出反饋的集合,那么對於 K的的 固定模的集合定義為矩陣特徵值所有可能集合的交集,即
 固定模
固定模 固定模 固定模
固定模 固定模 固定模
固定模 固定模
固定模 固定模
固定模式中表示特徵值的集合。我們注意到,K可以取零矩陣,因此,固定模的集合包含於。根據定義(1),固定模即是式(5)中固定多項式的根,即
 固定模
固定模 固定模
固定模 固定模
固定模 固定模
固定模{|和} (6)
式中S表示在整個S複平面上點的集合。
尋求固定模的方法
固定模戴維遜用以下的算法,提供了快速尋求系統固定模的方法。
 固定模
固定模步驟1 求所有A的特徵值,即。
 固定模 固定模
固定模 固定模 固定模
固定模步驟2 選擇任意矩陣(用偽隨機數發生器或其它方法)使表示矩陣的範數。
固定模步驟3 求的特徵值。
 固定模 固定模 固定模
固定模 固定模 固定模步驟4 對於 K的,即的固定模包含在與A的特徵值相同的特徵值之中。
步驟5 重複上述步驟4,直到止的固定模完全確定為止。
 固定模
固定模 固定模 固定模
固定模 固定模可以證明:集中系統的固定模,這裡是,即相應於系統不可控和不可觀測的模。
有了固定多項式和固定模的概念之後,就可以導出分散閉環系統穩定的充分和必要條件。
相關定理
 固定模
固定模定理1 對於式(1)和式(2)所描述的系統和式(4)那種類型的對角方決矩陣K, 若且唯若固定模的集合包含在S複平面的左半開平面,即
 固定模
固定模 固定模
固定模式中表示S複平面的左半開平面,那么式(3)所表示的局部反饋規律才能使系統漸近穩定。
