
簡介
 四輪轉向前後轉向控制
四輪轉向前後轉向控制若後輪的轉向與前輪轉向方向相同,則稱同向控制模式。其轉彎半徑比兩輪轉向的轉彎半徑大。汽車在40km/h以上行駛時,後輪同向偏轉角為2.5°。其作用是汽車在轉向時車身與行駛方向的偏轉角小,減少了汽車調整行駛轉向時的鏇轉和側滑,提高了操縱穩定性,且能保證汽車在潮濕路面上穩定地轉向。
若後輪的轉向與前輪轉向方向相反,稱反向(逆向)控制模式,其轉彎半徑比兩輪轉向的轉彎半徑小。低速時後輪逆向偏轉角最大為5°,適用於汽車駛入車庫和在狹窄的拐角處轉彎。隨著車速的升高,後輪轉向角變小,在車速達到達40km/h時轉向角變成0°。這就提高了汽車停車或在狹小空間轉向的機動性。
分類
最常見的四輪轉向系統主要有三種類型:機械式、液壓式和電子控制液壓式。使用最廣泛的4ws系統為電控液壓式,主要用於前輪採用液壓助力轉向系統的汽車中。
系統的優點
隨著汽車技術的發展,主動安全性日益受到重視。四輪轉向是提高主動安全性的方法之一。四輪轉向車輛首次出現於20世紀80年代的日本。近年來,本田、日產、馬自達等汽車廠商紛紛推出了帶有四輪轉向控制系統的概念車,並把一些成熟的四輪轉向技術套用到了它的普及型汽車中,提高了其汽車的主動安全性。四輪轉向系統具有以下顯著的優點:
首先,在轉向時能夠基本保持車輛質心側偏角為零,且能夠改善汽車對轉向盤輸入的動態回響特性,在一定程度上改善了橫擺角速度和側向加速度的瞬態回響性能指標,明顯改善車輛高速行駛的穩定性。當在高速行駛中轉向時,四輪轉向系統通過後輪與前輪的同相轉向,能有效降低/消除車輛側滑事故的發生幾率,明顯改善車輛高速行駛的穩定性及安全性,進而緩解駕駛者在各種路況下(尤其是在風雨天)高速駕車的疲勞程度。
其次,縮小車輛低速轉向時的轉彎半徑。在低速轉向時,車輛因前後輪的反向轉向能夠縮小轉彎半徑達20%。四輪轉向技術使大型車輛具有如同小型車輛的操縱及泊車敏捷性。
再次,提高了車輛的掛車能力。通過轉向後軸對掛車的轉向牽引,四輪轉向系統極大地提高了轉向操作隨動性和正確性,改善了車輛掛車行駛的操縱性、穩定性及安全性。
機械式系統
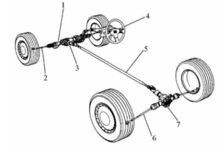 圖3 機械式四輪轉向
圖3 機械式四輪轉向系統組成
機械式四輪轉向系統在二輪轉向裝置(2WS)的基礎上,增設前輪轉向器、後輪轉向器和中央軸等元件。
工作原理
當轉動轉向盤時,前輪轉向器中的小齒輪由齒輪—齒條式轉向器的齒條帶動,將齒條的左右運動再變換為小齒輪的轉動,經中央軸使後輪轉向器的轉向齒輪產生動作。
當轉向盤轉動量小時,後輪與前輪同向偏轉;當轉向盤轉動量大時,後輪與前輪反向偏轉。這樣可以提高汽車高速時的操縱穩定性,並可以減小汽車的轉彎半徑。
液壓式系統
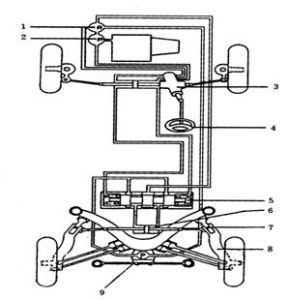 液壓式四輪轉向系統示意圖
液壓式四輪轉向系統示意圖1-儲油罐;2-轉向油泵;3-前輪動力轉向器;4-轉向盤;5-後輪轉向控制閥;6-後輪轉向動力缸;7-鉸接頭;8-從動臂;9-後輪轉向專用油泵組成。
這種液壓式四輪轉向系統對汽車的運行狀況隨時進行綜合判斷,可以精確控制後輪偏轉角,從而提高汽車中、高速行駛過程中的操縱穩定性。液壓油自油泵輸入到電磁閥和後輪控制閥,根據4WS電控單元的指令,然後進入能控制後輪偏轉角的動力缸。4WS電控單元對後輪偏轉角的控制分成兩部分:基本控制和修正控制。基本控制包含穩定性控制和回正控制。
汽車高速行駛時,慢速轉動轉向盤,後輪與前輪同向偏轉,進行穩定性控制;汽車低、中速行駛時,在轉動轉向盤的最初階段,後輪與前輪逆向偏轉,然後逐漸回正,即進行回正控制。修正控制則是根據道路交通狀況和駕駛員的操作情況對後輪的同向偏轉量或逆向偏轉量進行修正,使後輪達到期望的偏轉角度。該轉向系統的後輪最大偏轉角較小,汽車最小轉向半徑的減小有限。
電動式系統
電動四輪轉向系統前後輪轉向器均為電動助力,兩轉向器之間無任何機械連線裝置及液壓管道等部件,直接對前後輪的轉向進行控制,具有前後輪轉向角關係控制精確、控制自由度高、機構簡單等優點。電動四輪轉向系統由微機控制單元、前後輪轉向執行器、主副前輪轉向感測器,主、副後輪轉向感測器、後輪轉速感測器、車速感測器等組成。後輪轉向執行器包括一個通過循環球螺桿機械驅動轉向齒條的電動機。執行器內的復位彈簧在點火開關關閉時或四輪轉向系統失效時將後輪推到直線行駛位置。一個後輪轉角感測器和一個副後輪轉角感測器安裝在後輪轉向執行器的頂端。
發動機工作時,如果轉動轉向盤,四輪轉向控制單元接收所有感測器的信息並進行分析,通過內部預設的控制模式,確定後輪的偏轉角。然後控制後輪偏轉機構中的電動機驅動球形滾道螺母轉動,推動球形滾道螺桿移動,使後輪發生偏轉,電控單元再根據後輪偏轉機構中的主、輔偏轉角感測器反饋信號,對後輪的偏轉角進行修正。
