
簡介
當左副翼舵面向下,右副翼舵面向上時,飛機會向右偏航,然而在實際操作中,我們發現飛機有時會發生向左的滑移,與副翼操縱所要達到的效果正好相反,這種情況就是反向偏轉。
反向偏轉(Adverse yaw),也稱反向偏航,是飛行器在滾動的相反方向上偏轉的自然且不期望的趨勢。它是由向上和向下偏轉的副翼之間的型阻的差異、升力的差異以及由此引起的左翼和右翼之間的誘導阻力引起的。當副翼被故意設計成當向上偏轉時產生阻力和/或自動套用一定量的協調舵的機構,可以極大地最小化該效果。
產生原因
升力差異
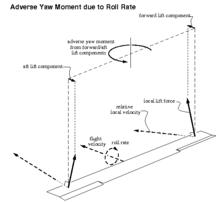 反向偏轉
反向偏轉按照定義,升力與來流方向垂直。當左翼向上偏轉時,其有效迎角減小,因此其升力矢量向後傾斜。當右翼下降時,其升力矢量向前傾斜。結果是產生與預期的右轉相反的橫向偏航力矩,導致飛機向左偏轉。
型阻差異
左側的副翼向下偏轉增加了翼型彎度,這通常將增加型阻。相反,右側的副翼向上偏轉將減小外傾角和輪廓阻力。輪廓阻力不平衡增加了不利的偏航力矩導致飛機反向偏航。
誘導阻力
向右滾動起動需要左翼比右翼有更大的升力。這還導致在左側比右側更大的誘導阻力,這進一步增加了不利的偏航,但是只是短暫地。一旦建立穩定的側傾率,左/右提升不平衡減小。
機翼的氣動特性決定了:只要升力增加,誘導阻力也會增加。當左副翼舵面向下,右副翼舵面向上時,機翼的翼型改變,左側機翼升力增加,右側減小,因此左側的誘導阻力大於右邊,結果導致飛機會向左偏航,與副翼操縱所要達到的機頭偏航方向正好相反,這就是反向偏航產生的機理。
解決方法
方向舵耦合
如所預期的,方向舵是管理偏航的最強大和有效的手段,但是機械地將其耦合到副翼是不切實際的。電子耦合線上控飛行器中是常見的。
減小升力係數
由於左/右升力矢量的傾斜是反向偏轉的主要原因,其中一個重要參數是這些升力矢量的大小,或者說是升力係數。因此實現低升力係數飛行將產生較小的不利偏航係數。
增強方向穩定性
強的方向穩定性是減少反向偏轉的一種方式。這可以通過增大垂尾力矩(垂尾面積和垂尾力臂)來增加方向穩定性。
差動副翼
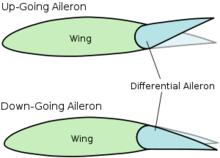 差動副翼
差動副翼在控制輪的給定運動下,一隻副翼的上升距離比另一隻副翼的下降距離大,差動副翼機構可使向上運動的副翼產生的寄生阻力抵消向下運動的副翼產生的阻力,阻力的這種平衡有助於逆偏航降低到最低程度,保障飛機的飛行安全。
弗里斯副翼
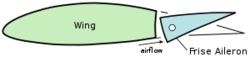 弗里斯副翼
弗里斯副翼弗里斯副翼的設計使得當副翼向上偏轉時,副翼的一些前緣將向下突出到氣流中,導致在該翼上的阻力增加。這將抵消由另一副翼產生的阻力,從而減少不利的偏航。
不幸的是,除了減少不利的偏航,弗里斯特副翼將增加飛機的整體阻力比套用方向舵糾正更多。因此,它們在最小化阻力很重要的飛機(例如在滑翔機中)中不太流行。
