
簡介
 北斗導航衛星
北斗導航衛星定位原理
35顆衛星在離地面2萬多千米的高空上,以固定的周期環繞地球運行,使得在任意時刻,在地面上的任意一點都可以同時觀測到4顆以上的衛星。
由於衛星的位置精確可知,在接收機對衛星觀測中,我們可得到衛星到接收機的距離,利用三維坐標中的距離公式,利用3顆衛星,就可以組成3個方程式,解出觀測點的位置(X,Y,Z)。考慮到衛星的時鐘與接收機時鐘之間的誤差,實際上有4個未知數,X、Y、Z和鐘差,因而需要引入第4顆衛星,形成4個方程式進行求解,從而得到觀測點的經緯度和高程。
事實上,接收機往往可以鎖住4顆以上的衛星,這時,接收機可按衛星的星座分布分成若干組,每組4顆,然後通過算法挑選出誤差最小的一組用作定位,從而提高精度。
衛星定位實施的是“到達時間差”(時延)的概念:利用每一顆衛星的精確位置和連續傳送的星上原子鐘生成的導航信息獲得從衛星至接收機的到達時間差。
衛星在空中連續傳送帶有時間和位置信息的無線電信號,供接收機接收。由於傳輸的距離因素,接收機接收到信號的時刻要比衛星傳送信號的時刻延遲,通常稱之為時延,因此,也可以通過時延來確定距離。衛星和接收機同時產生同樣的偽隨機碼,一旦兩個碼實現時間同步,接收機便能測定時延;將時延乘上光速,便能得到距離。
每顆衛星上的計算機和導航信息發生器非常精確地了解其軌道位置和系統時間,而全球監測站網保持連續跟蹤。
導航原理
 北斗導航衛星
北斗導航衛星衛星導航系統時間是由每顆衛星上原子鐘的銫和銣原子頻標保持的。這些星鍾一般來講精確到世界協調時(UTC)的幾納秒以內,UTC是由美國海軍觀象台的“主鍾”保持的,每台主鐘的穩定性為若干個10-13秒。衛星早期採用兩部銫頻標和兩部銣頻標,後來逐步改變為更多地採用銣頻標。通常,在任一指定時間內,每顆衛星上只有一台頻標在工作。
衛星導航原理:衛星至用戶間的距離測量是基於衛星信號的發射時間與到達接收機的時間之差,稱為偽距。為了計算用戶的三維位置和接收機時鐘偏差,偽距測量要求至少接收來自4顆衛星的信號。
由於衛星運行軌道、衛星時鐘存在誤差,大氣對流層、電離層對信號的影響,使得民用的定位精度只有數十米量級。為提高定位精度,普遍採用差分定位技術(如DGPS、DGNSS),建立地面基準站(差分台)進行衛星觀測,利用已知的基準站精確坐標,與觀測值進行比較,從而得出一修正數,並對外發布。接收機收到該修正數後,與自身的觀測值進行比較,消去大部分誤差,得到一個比較準確的位置。實驗表明,利用差分定位技術,定位精度可提高到米級。
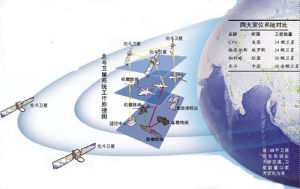
中國北斗衛星導航系統是繼美國GPS、俄羅斯格洛納斯、歐洲伽利略之後的全球第四大衛星導航系統。定位效果分析是導航系統性能評估的重要內容。此前,由於受地域限制,對北斗全球大範圍的定位效果分析只能通過仿真手段。
由武漢大學測繪學院和中國南極測繪研究中心杜玉軍、王澤民等科研人員進行的這項研究,在2011—2012年中國第28次南極科學考察期間,沿途大範圍採集了北斗和GPS連續實測數據,跨度北至中國天津,南至南極內陸崑崙站。同時還採集了中國南極中山站的靜態觀測數據。為對比分析不同區域靜態定位效果,在武漢也進行了靜態觀測。
科研人員利用嚴謹的分析研究方法,從信噪比、多路徑、可見衛星數、精度因子、定位精度等多個方面,對比分析了北斗和GPS在航線上不同區域、尤其是在遠洋及南極地區不同運動狀態下的定位效果。
結果表明,北斗系統信號質量總體上與GPS相當。在45度以內的中低緯地區,北斗動態定位精度與GPS相當,水平和高程方向分別可達10米和20米左右;北斗靜態定位水平方向精度為米級,也與GPS相當,高程方向10米左右,較GPS略差;在中高緯度地區,由於北斗可見衛星數較少、衛星分布較差,定位精度較差或無法定位。
“現階段的北斗已經實現區域定位,但還不具備全球定位能力,北斗與GPS在定位效果上的差異,主要是由衛星數量和分布造成的。”武漢大學中國南極測繪研究中心副主任王澤民教授說,“截至文中研究數據採集結束時,北斗系統在軌衛星數為11顆。中國成功發射了新一代北斗導航衛星,北斗系統在軌衛星數達到了17顆。隨著北斗系統全球組網拉開帷幕,相信今後的實測數據一定會更加精彩。”
系統功能
四大功能
短報文通信:北斗系統用戶終端具有雙向報文通信功能,用戶可以一次傳送40-60個漢字的短報文信息。
可以達到一次傳送達120個漢字的信息。在遠洋航行中有重要的套用價值。
精密授時:北斗系統具有精密授時功能,可向用戶提供20ns-100ns時間同步精度。
定位精度:水平精度100米(1σ),設立標校站之後為20米(類似差分狀態)。工作頻率:2491.75MHz。
系統容納的最大用戶數:540000戶/小時。
軍用功能
“北斗”衛星導航定位系統的軍事功能與GPS類似,如:運動目標的定位導航;為縮短反應時間的武器載具發射位置的快速定位;人員搜救、水上排雷的定位需求等。
這項功能用在軍事上,意味著可主動進行各級部隊的定位,也就是說大陸各級部隊一旦配備“北斗”衛星導航定位系統,除了可供自身定位導航外,高層指揮部也可隨時通過“北斗”系統掌握部隊位置,並傳遞相關命令,對任務的執行有相當大的助益。換言之,大陸可利用“北斗”衛星導航定位系統執行部隊指揮與管制及戰場管理。
民用功能
個人位置服務
當某人進入不熟悉的地方時,你可以使用裝有北斗衛星導航接收晶片的手機或車載衛星導航裝置找到其要走的路線。
氣象套用
北斗導航衛星氣象套用的開展,可以促進中國天氣分析和數值天氣預報、氣候變化監測和預測,也可以提高空間天氣預警業務水平,提升中國氣象防災減災的能力。
除此之外,北斗導航衛星系統的氣象套用對推動北斗導航衛星創新套用和產業拓展也具有重要的影響。
道路交通管理
衛星導航將有利於減緩交通阻塞,提升道路交通管理水平。通過在車輛上安裝衛星導航接收機和數據發射機,車輛的位置信息就能在幾秒鐘內自動轉發到中心站。這些位置信息可用於道路交通管理。
鐵路智慧型交通
衛星導航將促進傳統運輸方式實現升級與轉型。例如,在鐵路運輸領域,通過安裝衛星導航終端設備,可極大縮短列車行駛間隔時間,降低運輸成本,有效提高運輸效率。未來,北斗衛星導航系統將提供高可靠、高精度的定位、測速、授時服務,促進鐵路交通的現代化,實現傳統調度向智慧型交通管理的轉型。
海運和水運
海運和水運是全世界最廣泛的運輸方式之一,也是衛星導航最早套用的領域之一。在世界各大洋和江河湖泊行駛的各類船舶大多都安裝了衛星導航終端設備,使海上和水路運輸更為高效和安全。北斗衛星導航系統將在任何天氣條件下,為水上航行船舶提供導航定位和安全保障。同時,北斗衛星導航系統特有的短報文通信功能將支持各種新型服務的開發。
航空運輸
當飛機在機場跑道著陸時,最基本的要求是確保飛機相互間的安全距離。利用衛星導航精確定位與測速的優勢,可實時確定飛機的瞬時位置,有效減小飛機之間的安全距離,甚至在大霧天氣情況下,可以實現自動盲降,極大提高飛行安全和機場運營效率。通過將北斗衛星導航系統與其他系統的有效結合,將為航空運輸提供更多的安全保障。
應急救援
衛星導航已廣泛用於沙漠、山區、海洋等人煙稀少地區的搜尋救援。在發生地震、洪災等重大災害時,救援成功的關鍵在於及時了解災情並迅速到達救援地點。北斗衛星導航系統除導航定位外,還具備短報文通信功能,通過衛星導航終端設備可及時報告所處位置和受災情況,有效縮短救援搜尋時間,提高搶險救災時效,大大減少人民生命財產損失。
指導放牧
2014年10月,北斗系統開始在青海省牧區試點建設北斗衛星放牧信息化指導系統,主要依靠牧區放牧智慧型指導系統管理平台、牧民專用北鬥智能終端和牧場數據採集自動站,實現數據信息傳輸,並通過北斗地面站及北斗星群中轉、中繼處理,實現草場牧草、牛羊的動態監控。2015年夏季,試點牧區的牧民就能使用專用北鬥智能終端設備來指導放牧。
組成
北斗衛星導航系統空間段包括五顆靜止軌道衛星和三十顆非靜止軌道衛星。
地球靜止軌道衛星
共五顆,分別位於東經58.75度、80度、110.5度、140度和160度。
非靜止軌道衛星
由27顆中高度圓軌道衛星和3顆傾斜地球同步軌道衛星組成。
全球定位衛星系統的空間衛星一般運行在距離地面20000千米左右的太空,24-30顆衛星組成星座,依據其結構設計分布在3個或6個軌道平面上,相鄰軌道間的夾角相同。為保證系統的連續運行,一般在每個軌道上還部署一顆備份衛星,一旦有衛星發生故障,則可以立即替代。
服務方式
北斗導航衛星提供兩種服務方式,即開放服務和授權服務(屬於第二代系統)。
開放服務
是在服務區免費提供定位、測速和授時服務,定位精度為10米,授時精度為50納秒,測速精度0.2米/秒。
授權服務
是向授權用戶提供更安全的定位、測速、授時和通信服務以及系統完好性信息。
工作過程
北斗一號
 2010年11月1日1日零時26分長征三號丙運載火箭成功將第六顆北斗導航衛星送入太空
2010年11月1日1日零時26分長征三號丙運載火箭成功將第六顆北斗導航衛星送入太空對定位申請,中心控制系統測出兩個時間延遲:即從中心控制系統發出詢問信號,經某一顆衛星轉發到達用戶,用戶發出定位回響信號,經同一顆衛星轉發回中心控制系統的延遲;和從中心控制發出詢問信號,經上述同一衛星到達用戶,用戶發出回響信號,經另一顆衛星轉發回中心控制系統的延遲。由於中心控制系統和兩顆衛星的位置均是已知的,因此由上面兩個延遲量可以算出用戶到第一顆衛星的距離,以及用戶到兩顆衛星距離之和,從而知道用戶處於一個以第一顆衛星為球心的一個球面,和以兩顆衛星為焦點的橢球面之間的交線上。另外中心控制系統從存儲在計算機內的數位化地形圖查尋到用戶高程值,又可知道用戶處於某一與地球基準橢球面平行的橢球面上。從而中心控制系統可最終計算出用戶所在點的三維坐標,這個坐標經加密由出站信號傳送給用戶。
北斗二號
空間段衛星接收地面運控系統上行注入的導航電文及參數,並且連續向地面用戶發播衛星導航信號,用戶接收到至少4顆衛星信號後,進行偽距測量和定位解算,最後得到定位結果。同時為了保持地面運控系統各站之間時間同步,以及地面站與衛星之間時間同步,通過站間和星地時間比對觀測與處理完成地面站間和衛星與地面站間時間同步。分布國土內的監測站負責對其可視範圍內的衛星進行監測,採集各類觀測數據後將其傳送至主控站,由主控站完成衛星軌道精密確定及其它導航參數的確定、廣域差分信息和完好性信息處理,形成上行注入的導航電文及參數。發射記錄
| 北斗衛星發射列表 | ||||
|---|---|---|---|---|
| 發射時間 | 火箭 | 衛星編號 | 衛星類型 | 發射地點 |
| 2000年10月31日 | 北斗-1A | 北斗1號 | 西昌 | |
| 2000年12月21日 | 北斗-1B | |||
| 2003年5月25日 | 北斗-1C | |||
| 2007年2月3日 | 北斗-1D | |||
| 2007年4月14日04時11分 | 長征三號甲 | 第一顆北斗導航衛星(M1) | 北斗2號 | |
| 2009年4月15日 | 長征三號丙 | 第二顆北斗導航衛星(G2) | ||
| 2010年1月17日 | 第三顆北斗導航衛星(G1) | |||
| 2010年6月2日 | 第四顆北斗導航衛星(G3) | |||
| 2010年8月1日05時30分 | 長征三號甲 | 第五顆北斗導航衛星(I1) | ||
| 2010年11月1日00時26分 | 長征三號丙 | 第六顆北斗導航衛星(G4) | ||
| 2010年12月18日04時20分 | 長征三號甲 | 第七顆北斗導航衛星(I2) | ||
| 2011年4月10日04時47分 | 第八顆北斗導航衛星(I3) | |||
| 2011年7月27日05時44分 | 第九顆北斗導航衛星(I4) | |||
| 2011年12月2日05時07分 | 第十顆北斗導航衛星(I5) | |||
| 2012年2月25日0時12分 | 長征三號丙 | 第十一顆北斗導航衛星 | ||
| 2012年4月30日4時50分 | 長征三號乙 | 第十二、第十三顆北斗導航系統組網衛星(“一箭雙星”) | ||
| 2012年9月19日3時10分 | 長征三號乙 | 第十四、十五顆北斗導航系統組網衛星“一箭雙星”) | ||
| 2012年10月25日23時33分 | 長征三號丙 | 第十六顆北斗導航衛星 | ||
| 2016年2月1日15時29分 | 長征三號丙 | 第五顆新一代北斗導航衛星 | ||
| 2016年3月30日4時11分 | 長征三號甲 | 第二十二顆北斗導航衛星 | ||
衛星組成
| 發射日期 | 發射火箭 | 衛星 | 軌道類別 | 運行狀況 | 備註 |
|---|---|---|---|---|---|
| 2000.10.31 | CZ-3A Y5 | 北斗-1A | 廢棄衛星軌道 | 停止工作 | 北斗一號 |
| 2000.12.21 | CZ-3A Y6 | 北斗-1B | 廢棄衛星軌道 | 停止工作 | |
| 2003.5.25 | CZ-3A Y7 | 北斗-1C | 地球靜止軌道 85.3°E | 正常 | |
| 2007.2.3 | CZ-3A Y12 | 北斗-1D | 廢棄衛星軌道 | 失效 | |
| 2007.4.14 | CZ-3A Y13 | 北斗-M1 | 中地球軌道~21500km | 正常,測試星 | 北斗二號 |
| 2009.4.15 | CZ-3C Y3 | 北斗-G2 | 35594 x 36036 km 漂移 | 失效 | |
| 2010.1.17 | CZ-3C Y2 | 北斗-G1 | 地球靜止軌道 140°E | 正常 | |
| 2010.6.2 | CZ-3C Y4 | 北斗-G3 | 地球靜止軌道 84°E | 正常 | |
| 2010.8.1 | CZ-3A Y16 | 北斗-I1 | 傾斜地球同步軌道傾角55° | 正常 | |
| 2010.11.1 | CZ-3C Y5 | 北斗-G4 | 地球靜止軌道 160°E | 正常 | |
| 2010.12.18 | CZ-3A Y18 | 北斗-I2 | 傾斜地球同步軌道 傾角55° | 正常 | |
| 2011.4.10 | CZ-3A Y19 | 北斗-I3 | 傾斜地球同步軌道 傾角55° | 正常 | |
| 2011.7.27 | CZ-3A Y17 | 北斗-I4 | 傾斜地球同步軌道 傾角55° | 正常 | |
| 2011.12.2 | CZ-3A Y23 | 北斗-I5 | 傾斜地球同步軌道 傾角55° | 正常 | |
| 2012.2.25 | CZ-3C Y6 | 北斗-G5 | 地球靜止軌道 58.5°E | 正常 | |
| 2012.4.30 | CZ-3B Y14 | 北斗-M3 | 中地球軌道~21500km | 正常 | |
| 2012.4.30 | CZ-3B Y14 | 北斗-M4 | 中地球軌道~21332km | 正常 | |
| 2012.9.19 | CZ-3B Y15 | 北斗-M5 | 中地球軌道~21332km | 正常 | |
| 2012.9.19 | CZ-3B Y15 | 北斗-M6 | 中地球軌道~21332km | 正常 | |
| 2012.10.25 | CZ-3C Y | 北斗-G6 | 地球靜止軌道 110.5°E | |
星座構成
北斗衛星導航系統由空間段計畫由35顆衛星組成,包括5顆靜止軌道衛星、27顆中地球軌道衛星、3顆傾斜同步軌道衛星。5顆靜止軌道衛星定點位置為東經58.75°、80°、110.5°、140°、160°,中地球軌道衛星運行在3個軌道面上,軌道面之間為相隔120°均勻分布。至2012年底北斗亞太區域導航正式開通時,已為正式系統在西昌衛星發射中心發射了16顆衛星,其中14顆組網並提供服務,分別為5顆靜止軌道衛星、5顆傾斜地球同步軌道衛星(均在傾角55°的軌道面上),4顆中地球軌道衛星(均在傾角55°的軌道面上)。| 序號 | 衛星 | 發射日期 | 火箭 | 運行軌道 | 使用狀況 | 狀態 |
|---|---|---|---|---|---|---|
| 1 | 北斗-M1 | 2007年04月14日 | 長征三號甲 | 中地球軌道,高度21559公里,傾角56.8° | 試驗星未使用 | M1 |
| 2 | 北斗-G2 | 2009年04月15日 | 長征三號丙 | 有誤差的地球靜止軌道,高度36027公里,傾角2.2° | 失控未使用 | G2 |
| 3 | 北斗-G1 | 2010年01月17日 | 長征三號丙 | 地球靜止軌道140.0°E,高度35807公里,傾角1.6° | 使用中 | G1 |
| 4 | 北斗-G3 | 2010年06月02日 | 長征三號丙 | 地球靜止軌道110.6°E,高度35809公里,傾角1.3° | 使用中 | G3 |
| 5 | 北斗-IGSO1 | 2010年08月01日 | 長征三號甲 | 傾斜地球同步軌道,高度35916公里,傾角54.6° | 使用中 | IGSO1 |
| 6 | 北斗-G4 | 2010年11月01日 | 長征三號丙 | 地球靜止軌道160.0°E,高度35815公里,傾角0.6° | 使用中 | G4 |
| 7 | 北斗-IGSO2 | 2010年12月18日 | 長征三號甲 | 傾斜地球同步軌道,高度35883公里, 傾角54.8° | 使用中 | IGSO2 |
| 8 | 北斗-IGSO3 | 2011年04月10日 | 長征三號甲 | 傾斜地球同步軌道,高度35911公里, 傾角55.9° | 使用中 | IGSO3 |
| 9 | 北斗-IGSO4 | 2011年07月27日 | 長征三號甲 | 傾斜地球同步軌道,高度35879公里, 傾角54.9° | 使用中 | IGSO4 |
| 10 | 北斗-IGSO5 | 2011年12月02日 | 長征三號甲 | 傾斜地球同步軌道,高度35880公里, 傾角54.9° | 使用中 | IGSO5 |
| 11 | 北斗-G5 | 2012年02月25日 | 長征三號丙 | 地球靜止軌道58.7°E,高度35801公里,傾角1.4° | 使用中 | G5 |
| 12 | 北斗-M3 | 2012年04月30日 | 長征三號乙 | 中地球軌道,高度21607公里,傾角55.3° | 使用中 | M3 |
| 13 | 北斗-M4 | 2012年04月30日 | 長征三號乙 | 中地球軌道,高度21617公里,傾角55.2° | 使用中 | M4 |
| 14 | 北斗-M5 | 2012年09月19日 | 長征三號乙 | 中地球軌道 ,高度21597公里,傾角55.0° | 使用中 | M5 |
| 15 | 北斗-M6 | 2012年09月19日 | 長征三號乙 | 中地球軌道,高度21576公里,傾角55.1° | 使用中 | M6 |
| 16 | 北斗-G6 | 2012年10月25日 | 長征三號丙 | 地球靜止軌道80.2°E,高度35803公里,傾角1.7° | 使用中 | G6 |
