
簡介
近年來隨著計算機技術的發展,三維數據測量技術有了更廣泛的套用,例如文物保護、機械加工、影視特技製作、虛擬現實、服裝設計等。
(1)在文物保護方面,三維數據測量技術能以不損傷物體的手段,獲得文物的外形尺寸,記錄的信息完
整全面,而不是象照片那樣僅僅是幾個側面的圖像。而且這些信息便於長期保存,便於複製、再現、傳輸、查閱和交流。
(2)在工業生產方面,利用三維數據測量技術獲取零件表面每個點的坐標之後,就可以進行數控加工。
(3)在影視特技製作方面,利用三維數據測量技術將演員、道具、模型等的表面空間數據輸入計算機中,構成與真實物體完全一致的模型,有了這些數位化模型,就可以用計算機三維動畫軟體對它們做進一步的特技處理。
(4)在服裝製造方面傳統的服裝製造,都是按照標準人形尺寸批量生產,隨著生活水平的提高,人們開始越來越多地追求個性化服裝設計。三維數據測量技術可以快速地測得人體的三維數據,建立人體模型,將這些數據與服裝技術結合就可以按每個人的具體尺寸進行服裝設計,並且可以直接在計算機上觀看最終的著裝效果。
三維數據測量技術在這些領域的廣泛套用促進了這些領域的發展,同時,這些領域的進一步發展對三維數據測量技術有了更高的要求,主要包括較低的測量成本、更快的測量速度、更高的測量精度等。然而傳統的三維數據測量方法已經不能很好地適應目前的需求,例如有的測量方法需要較昂貴的設備,有的測量速度慢,有的測量精度不高,因此迫切需要低成本、高精度、方便快捷的三維數據測量方法。
分類
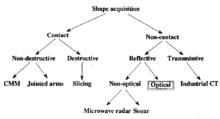 圖1 三維測量的分類
圖1 三維測量的分類根據其採用的原理或媒介的不同可以將其分為兩大類接觸式測量和非接觸式測量,如圖1所示。接觸式測量顧名思義是在測量時與被測物體相接觸的測量方法,它又可以分為破壞式測量和非破壞式測量兩種。非接觸式測量可以分為反射式測量和穿透式測量。
接觸式測量
非破壞式測量
坐標測量機和機械測量臂是接觸非破壞式測量的代表。
坐標測量機(CMM)是較早套用於三維測量的工具,目前CMM仍是工廠的標準立體測量裝備。它將一個探針裝在3自由度(或更多自由度)的伺服裝置上,驅動探針沿三個方向移動。當探針接觸物體表面時,測量其在三個方向的移動,就可知道物體表面這一點的三維坐標。控制探針在物體表面移動和觸碰,可以完成整個表面的三維測量。其優點是測量精度高,缺點是價格昂貴,物體形狀複雜時的控制複雜、速度慢。
機械測量臂借用了坐標測量機的接觸探針原理,把驅動伺服機構改為可精確定位的多關節隨動式機械臂,由人牽引裝有探針的機械臂在物體表面滑動掃描。利用機械臂關節上的角度感測器的測量值,可以計算探針的三維坐標。因為人的牽引使其速度比坐標測量機快,而且結構簡單,成本低,靈活性好。
破壞式測量
切片式測量是接觸破壞式測量的代表。該方法通過將物體切削獲取物體截面的數據,並將截面數據組合而得到物體的三維數據。此方法不但可以獲取物體外圍三維數據而且可以獲取物體內部的三維數據。該方法的缺點是會對被測物體造成永久性損壞,並且對物體的切削需要精密設備。前不久國內的“數位化可視人”項目就是將人體標本切削成2518個連續橫斷面切片,通過這些斷面獲取人體的三維數據。
非接觸式測量
穿透式測量
計算機斷層攝影術(Computer tomography, CT)屬於穿透式測量法。在工業CT中,讓X射線穿越物體然後檢測在各個不同的方向穿越物體過後的射線強度。利用這些不同方向上的投影數據,就可以重建高清晰度的物體斷面圖像。這種透射方式相對於反射方式主要有以下一些優點:它不易受物體表面反射特性的影響,能夠獲得從外部不可見的物體內腔形體信息。工業CT掃瞄器的主要缺點有:CT造價很高,物質密度的大變化(例如粘著木頭的金屬)會降低精確度,因為使用放射性物質,所以具有潛在的危險。
反射式測量
反射式測量分為:光學測量和非光學測量。
(1)非光學測量向被測物體表面發出各種波,依據波的反射時間或相位變化,可以推算物體表面的空間位置,如早期的雷達聲納測距等。但由於早期技術限制只能估算物體的方位和大概距離。近些年來藉助雷達測距器原理,發展了利用雷射或超音波等為媒介的測量方法。由於對信號和時間的精確測量比較困難,因此難以對小尺寸的物體測量。
(2)光學測量是目前三維數據測量研究的主要方向之一,其分類情況如圖2所示。光學測量分為主動式和被動式兩種。
被動三維測量採用非結構照明方式,從一個或多個攝像系統獲取的二維圖像中確定距離信息,從而形成三維面形數據。包括採用一幅圖像的從陰影恢復形狀法(Shape-from-shading )、利用幾何光學的聚焦原理進行距離測量的聚焦或散焦測量法(Range from focus)、採用兩幅或多幅圖像的立體視覺法(Stereo vision )、對視頻流進行基於光流場的運動分析的方法。在這些方法中,對於從一個攝像系統獲取的二維圖像中確定距離信息時,需要依賴於物體的大致形態、光照條件等先驗知識。如果這些知識不完整,對距離的計算可能產生誤差;對於從兩個或多個攝像系統獲取的不同視覺方向的二維圖像中確定距離信息時,通過相關或匹配等運算可以獲取物體的三維數據,但這種雙目立體的重建方法常常要求進行大量的數據運算,當被測物體上各點反射率沒有明顯差異時,這種運算變得更加困難。因此,被動三維數據測量常常用於對三維目標的識別以及形態分析。這類方法適用於無法採用結構照明的環境。雖然這種方法系統結構相對比較簡單,但是很難滿足大多數套用情況下對大數據量和高精度數據的要求。
主動式光學三維數據測量即結構光測量,通常以某種形狀結構的光投射到物體表面,監測反射光,從而得到物體的三維信息。相對於被動的和非光學的方法,許多主動式方法能夠很快地獲得大量的、高精度的三維數據。相對於工業CT,他們更安全,而且造價低。當然他們也存在只能測量物體表面可見部分的形體的局限。
主動測量(結構光測量)方法
莫爾等高線法
自Meadows等1970年提出莫爾輪廓法以來,在此基礎上提出了投影(Projection)莫爾法、影像(Shadow)莫爾法、掃描(Scanning)莫爾法以及這些方法的改進方法。其中投影莫爾法的特點是適合於測量較大的物體。影像莫爾法的特點是原理簡單,精度高,但由於製造面積較大的光柵較為困難,故該方法只適用於小物體的測量。
位相測量法(PMP)
這種方法採用正弦光柵投影和相移技術,通過獲取全場條紋的空間信息和一個條紋周期內相移條紋的時序信息,重建物體的三維立體形狀。這種方法的特點是精度高,缺點是不能消除條紋中高頻噪聲引起的誤差。近年來PMP技術的進展主要有:
(1)基於離焦投影羅奇光柵的PMP方法,這種方法採用由離焦引起的光學低通濾波和N位相算法表征的數字濾波的解析描述,該法的主要優點是在一定離焦範圍內和適當選擇相移次數的情況下,系統仍具有很高的測量精度;
(2)提出了智慧型型主動光學三維感測的概念和體系結構,實現了採用計算機控制的液晶投影儀的全電子PMP三維感測系統;
(3)複雜形體的三維感測技術取得較大進展,提出了許多複雜位相場的展開方法,如條紋跟蹤法((Fringe tracking)、格線自動法(Cellular automata)、洪水算法(Flood algorithm)、位相梯度展開法、二元模板法、基於調製深度的展開方法以及神經網路方法等。
傅立葉變換輪廓法(FTP)
該方法以羅奇光柵產生的結構光場投影到待測三維物體表面,對結構光場進行傅立葉分析、濾波和逆傅立葉分析,就可以從變形圖形中提取三維面形信息。該技術具有比傳統莫爾技術更高的靈敏度,並全自動區分物體表面的起伏變化,對條紋階次和內插數的設定沒有要求,沒有由光柵圖形的高次諧波成分產生的假的莫爾條紋所引起的誤差。近年來有兩種較成功的改進方法,一種是採用正弦光柵投影和相移技術,可以使FTP測量的最大範圍增加3倍;另一種是為了消除類散斑噪聲的影響而發展起來的二維傅立葉變換和二維濾波的方法。FTP法的不足之處在於當測量斜率大的物體時需要極高解析度的圖像獲取設備和運算能力大的計算機。
光學三角形法(光切法)
其基本思想是利用照明光源中的幾何信息幫助提取景物中的三維信息。向物體投射結構光,拍攝結構光在物面調製下的畸變圖像,利用幾何光學成像原理從圖像得到物面的三維信息,結構光的光源可以採用雷射或者普通的可見光。從結構光光源的幾何形狀上來說,有點狀、單線、多線、網狀等多種形狀。由於該方法具有算法簡單、掃描速度快、測量精度高、實用性強等優點,因此在許多三維掃描系統中有著廣泛的套用。
立體視覺與結構光相結合的方法
立體視覺獲取物體三維數據的難點在於尋找圖像中的匹配點,對物體投射結構光可以幫助獲取圖像中匹配點,彌補了立體視覺的不足 。
