簡介
SCOOT將其所控制的路口或路段人行橫道視為道路網中的節點,在每個信號周期內,根據本周期各方向(即節點上的各連線)到達節點交通需求的變化,從交通均衡、交通相關和交通連續的角度,對每次綠燈時間的變化進行最佳化調整,同時,系統的使用者還可以根據具體實際情況和控制戰略要求,施加帶有傾向性的干預,從而在減少延誤,縮短旅行時間,提高通行能力方面獲得明顯穩定的效果。
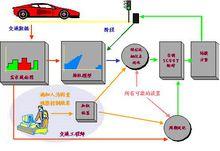 scoot流程
scoot流程SCOOT系統根據檢測器得到的實時數據計算交通量、占用時間、占有率及擁擠程度。同時,它結合檢測數據和預先存儲的交通參數對各路口進行車隊預測,由此利用交通環境對子區和路網的信號配時進行最佳化。SCOOT 系統因其在套用中的良好表現得到了普遍認可,套用越來越廣泛。
研究與套用歷史
SCOOT(Split, Cycle and Offset Optimization Technique)產生於70年代的英國,由英國運輸與道路研究所(TRRL)研製成功。
它的模型基礎原自TRANSYT(TrafficNetwork Study Tool),採用了同樣的周期流分布圖(CFP)的建模方式和相近的目標函式。不過有了顯著的改進,TRANSYT的CFP是以歷史的平均交通流計算的;而SCOOT是在線上模型,CFP是實時測量的。
SCOOT的研究始於1973年,並在1977年的哥拉斯格市進行現場試驗,1979年在該市大規模試驗獲得圓滿成功,從此在英國進行全面的推廣。
二十世紀80年代初引入中國,成都、大連、北京等用SCOOT.
基本原理
SCOOT通過車輛檢測器實時的測量並跟蹤交通運動,他利用一個在線上的交通模型和相應的控制參數最佳化程式來最佳化信號控制器的配時。SCOOT的檢測器在當時創新之處就是集計數檢測器和占有率檢測器兩種功能於一身。它能測量流量和占有率的混合參數;安裝在適當的位置可直接測量交通阻塞。
SCOOT檢測器的環形線圈埋設在上游交叉路口的出口,檢測的數據上傳至”UTC”計算機中,經過處理便生成了SCOOT的模型核心——周期流分布圖CFP。
SCOOT的最佳化程式的任務就是利用CFP和交通模型找出信號配時參數的最佳組合。為了跟蹤CFP的瞬時變化,SCOOT的最佳化程式採用小增量尋優方法,即信號配時參數可隨CFP的變化作相應的微小變化。採用這種參數微調的好處是,對交通的連續運動妨礙最小,又不以為交通參與者所察覺。
系統結構
SCOOT系統是一種實時自適應控制系統,其硬體組成包括3個主要部分:中心計算機及外圍設備,數據傳輸網路和外設裝置(包括交通信號控制機、地感線圈檢測器或視頻檢測器、信號燈)。軟體大體由5個部分組成:1)車輛檢測數據的採集和分析;2)交通模型(用於計算延誤時間和排隊長度等等);3)配時方案參數最佳化調整;4)信號控制方案的執行;5)系統運行狀態實時監測。以上5個子系統相互配合、協調工作,共同完成交通控制任務。
系統特點
SCOOT系統是方案形成式控制方式的典型代表,是一種實時自適應交通信號控制系統。SCOOT系統通過連續檢測道路網路中交叉口所有進口道交通需求來最佳化每個交叉口的配時方案,使交叉口的延誤和停車次數最小的動態、實時、線上信號控制系統。概括來講,SCOOT系統具有5個特點。
1) 實用性強,幾乎不受城市交通出行方式、出行起訖點分布、土地使用情況、季節性和臨時性交通變化以及天氣和氣候變化的影響。
2) 對配時參數的最佳化是採用連續微量調整的方式,即每個信號周期內,只對綠信比和綠燈起步時時距做±(1~4)s的調整,穩定性強。
3) 個別交通車輛檢測器錯誤的反饋信息幾乎不影響SCOOT系統對配時方案參數的最佳化,而且該系統對這類錯誤的信息有自動鑑別和淘汰功能。
4) 對實時交通狀況變化趨勢反應靈敏。
5) SCOOT系統能提供各種反映路網交通狀況的信息,為制定綜合管理決策創造了有利的條件。但是,SCOOT系統幾乎所有相關控制策略模型都是通過數學模型的仿真中獲得,這就要求抽象的數學模型必須準確地反映系統的運行狀態,誤差範圍小。否則,必然會影響控制效果;另一方面,數學模型的精確度越高,結構就越複雜,因而仿真時間就越長,這將會在實時性與可靠性之間產生矛盾,特別要求進一步提高效果時,這一矛盾就會越突出。
