
電機矢量控制
矢量控制理論是由德國F.Blaschke首先提出。這一理論是從電機統一理論、機電能量轉換和矢量變換理論的基礎上發展起來的,基本思想是把異步電動機模擬轉化為直流電機來加以達到更好更簡便的控制。在建立數學模型的時候一般都會按上述方法將電機理想化。矢量控制在國際上一般多稱為磁場定向控制,也就是把磁場的方向作為坐標軸的基準方向,電動機電流矢量的大小、方向均由瞬時值來表示。這個理論是1968年Darmstader工科大學的Hasse博士初步提出的。
矢量控制技術按照獲得磁鏈的不同方式大致可分為兩種:直接和間接方式。直接方式的實現依賴於直接測量或對轉子、定子、氣隙磁鏈矢量的幅值和位置的估算。傳統的直接矢量控制策略使用檢測線圈,具有抽頭的定子繞組或霍爾效應感測器對磁通進行檢測,但由於電機結構或散熱的需要就會產生一定的限制,但隨著目前高速 DSP的不斷面世,在一個 PWM 周期內,實現負載的控制及磁鏈估算應成為可能。而間接方式則使用電動機模型,例如對於轉子磁通定向控制,它利用了固有的轉差關係。與直接的方法相比,間接方式對電機參數有較高的依賴性。多數場合使用間接策略,因為這會使硬體電路相對簡單並且在低頻下也具有較好的總體性能,但是由於包含了會隨著溫度,飽和度和頻率變化而變化的電機參數,所以需要研究不同的參數自適應方法 。
直接轉矩控制
直接轉矩控制的基本思路是準確觀測定子磁鏈空間大小、位置,然後保持它的幅值基本不變以及準確計算負載轉矩的前提下,通過控制電機的瞬時電壓輸入來控制電機定子磁鏈的瞬時旋轉速度,來改變它對轉子的瞬時轉差率,達到直接控制電機輸出的目的。
在直接轉矩控制中,電機定子磁鏈的幅值通過上述電壓的矢量控制而保持為額定值,要改變轉矩大小,可以通過控制定、轉子磁鏈之間的夾角來實現。而夾角可以通過電壓空間矢量的控制來調節。由於轉子磁鏈的轉動速度保持不變,因此夾角的調節可以通過調節定子磁鏈的瞬時轉動速度來實現。
假定電機轉子逆時針方向旋轉,如果實際轉矩小於給定值,則選擇使定子磁鏈逆時針方向旋轉的電壓矢量,這樣角度增加,實際轉矩增加,一旦實際轉矩高與給定值,則選擇電壓矢量使定子磁鏈反方向旋轉。從而導致角度降低。通過這種方式選擇電壓矢量,定子磁鏈一直旋轉,且其旋轉方向由轉矩滯環控制器決定。
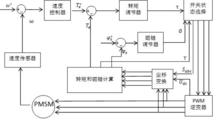 圖1 直接轉矩控制的原理框圖
圖1 直接轉矩控制的原理框圖直接轉矩控制對轉矩和磁鏈的控制要通過滯環比較器來實現。滯環比較器的運行原理為:當前值與給定值的誤差在滯環比較器的容差範圍內時,比較器的輸出保持不變,一旦超過這個範圍,滯環比較器便給出相應的值。
直接轉矩控制的原理框圖如圖1所示,給定轉速與估計轉速相比較,得到給定轉矩;經轉矩調節器將轉矩差做滯環處理得到轉矩控制信號;將磁鏈估計值跟給定磁鏈相比,經滯環比較器得到磁鏈控制信號;根據計算的得到的轉子位移,劃分區段;根據區段,以及轉矩和磁鏈控制信號,結合查找表得出空間矢量,生成PWM波;輸出給逆變器,給電機供電。
電動汽車對驅動控制技術的基本要求
制約電動汽車發展的三大核心技術分別是電機、電池和電機驅動控制技術。一般的電動汽車對電機驅動控制技術的基本要求包括:(1)功率密度高;(2)啟動轉矩大;(3)轉速範圍寬;(4)運行效率高;(5)過載能力強;(6)可靠性高;(7)轉矩脈動小、噪聲低;(8)成本低 。電動汽車對驅動控制系統的總體要求如表1 所示 。
| 序號 | 名稱 | 基本要求 |
| 1 | 驅動電機 | 起動制動要求:頻繁啟動、制動、加速、爬坡的基本要求。 |
| 起動轉矩大,過載能力強,能達到 3~4 倍額定轉矩。 | ||
| 調速範圍:達到 20%~100%;基頻以下恆轉矩調速、基頻以上恆功率調速穩定性;最高車速下能平穩運行的要求。 | ||
| 比功率:要求大於1~1.25k W/kg。 | ||
| 能量轉換效率:在典型工況下達到 85%~93%。 | ||
| 2 | 驅動控制器 | 起動、制動特性:要求有良好的制動、驅動轉矩回響特性。 |
| 高低速:低速時要求轉矩足夠大,啟動快;高速時要求輸出轉矩回響快,運行平穩。 | ||
| 加速性能:要求有好的加速性能,加速快,無超調。 | ||
| 再生制動功能:要求再生制動時的能量回饋效率高。 | ||
| 3 | 環境適應性 | 能不同的環境下安全、穩定、可靠工作。 |
| 4 | 可維護性 | 易於維護,無超標噪聲。 |
驅動電機
 圖2電動汽車用電動機及驅動系統的性能比較
圖2電動汽車用電動機及驅動系統的性能比較對於電動汽車驅動控制技術的研究而言,選用不同的驅動電機,其控制方式及研究熱點也不相同。電動汽車用驅動電機主要包括直流電機(DCM)、感應電機(IM)、開關磁阻電機(SRM)和永磁無刷電機(PMBLM),永磁無刷電機又包括永磁同步電機(PMSM)和永磁無刷直流電機(BLDCM)。其性能對比如圖2所示。
直流電機
由於直流電機發展比較早,各方面的控制技術比較成熟,因此早期的電動汽車多選用直流電機來驅動,但是隨著電機技術的逐漸發展和成熟,直流電機因為固有的電刷和機械式換向器結構而具有的噪聲大、電磁干擾嚴重、維修頻繁等弊端,使其逐漸退出了歷史的舞台。
感應電機
感應電機相對於直流電機而言,結構更加簡單,耐用性更好,但由於勵磁繞組的存在,其體積較大、功率因素較低,因此需要大容量的變頻器,控制系統比較複雜。
開關磁阻電機
開關磁阻電機由於轉子上沒有永磁體或繞組,因此具有結構簡單、功率密度大、啟動轉矩大、啟動電流小、成本低、維護方便等恃性,其缺點就是本身的雙凸極結構所帶來的轉矩脈動較大,因此導致噪聲比較嚴重。
永磁無刷電機
永磁無刷電機因為磁路結構的不同,其轉子永磁體所產生的反電勢波形也不相同,反電勢為正弦波的稱為永磁同步電機,反電勢為梯形波的稱為永磁無刷直流電機。永磁無刷電機具有的主要優點及其原因有:
(1)效率高:永磁無刷電機之所以效率高,從結構上分析主要是因為轉子永磁體勵磁的方式不會產生銅損耗和勵磁損耗,同時無刷的結構也大大降低了摩擦損耗。
(2)體積小、重量輕:對於一般的電機,繞組線圈的重量占電機重量的比重較髙,因此,無刷電機用高能量密度的永磁體代替勵磁繞狙必然會使得電機的體積變小、重量減捏。
(3)易冷卻:因為沒有勵磁繞組,轉子中沒有環形電流,所以永磁無刷電機的發熱主要由定子繞組產生,定子繞組靠近電機表面,因此容易冷卻,一般採用風冷即可。
(4)耐用性好、可靠性高、後期維護成本低:沒有電刷和機械式換向器,電機壽命僅與定子繞組的絕緣性、軸承和永磁體的質量有關,後期也不需要經常維護。
(5)動態性能好:因為體積小、質量捏,所轉子的電磁時間常數小、轉矩回響迅速。
同樣的,永磁無刷電機也存在成本較高、永磁體會在離溫和大的反向磁場下退磁等缺點 。
