
機構簡介
基本的執行機構用於把閥門驅動至全開或全關的位置。用於控制閥的執行機構能夠精確的使閥門走到任何位置。儘管大部分執行機構都是用於開關閥門,但是如今的執行機構的設計遠遠超出了簡單的開關功能,它們包含了位置感應裝置,力矩感應裝置,電極保護裝置,邏輯控制裝置,數字通訊模組及PID控制模組等,而這些裝置全部安裝在一個緊湊的外殼內。
因為越來越多的工廠採用了自動化控制,人工操作被機械或自動化設備所替代,人們要求執行機構能夠起到控制系統與閥門機械運動之間的界面作用,更要求執行機構增強工作安全性能和環境保護性能。在一些危險性的場合,自動化的執行機構裝置能減少人員的傷害。
 剖面圖
剖面圖某些特殊閥門要求在特殊情況下緊急打開或關閉,閥門執行機構能阻止危險進一步擴散同時將工廠損失減至最少。對一些高壓大口徑的閥門,所需的執行機構輸出力矩非常大,這時所需執行機構必須提高機械效率並使用高輸出的電機,這樣才能平穩的操作大口徑閥門。對於一些小扭矩的閥門,精小型的電動閥門也套用而生,相比普通型具有重量輕,結構緊湊,功能齊全等優點。
閥門
為了成功的實現過程自動化,最重要的是要確保閥門自身能夠滿足過程及管道內介質的特殊要求。通常生產過程和工藝介質能夠決定閥門的種類,閥芯的類型以及閥內件和閥門的結構和材料。
 精小型
精小型閥門選擇好後接下來就要考慮自動化的要求即執行機構的選擇。可以簡單的按兩種基本的閥門操作類型來考慮執行機構。
旋轉式閥門
這類閥門包括:旋塞閥、球閥、蝶閥以及風門或擋板。這類閥門需要已要求的力矩進行90度旋轉操作的執行機構
多迴轉閥門
這類閥門可以是非旋轉提升式閥桿或旋轉非提升式桿,或者說是他們需要多轉操作去驅動閥門到開或關的位置。這類閥門包括:直通閥(截止閥)、閘閥、刀閘閥等。作為一種選擇,直線輸出的氣動或液動氣缸或薄膜執行機構也開來驅動上述閥門。
優點
電動執行機構的主要優點就是高度的穩定和用戶可套用的恆定的推力,最大執行器產生的推力可高達225000kgf,能達到這么大推力的只有液動執行器,但液動執行器造價要比電動高很多。
電動執行器的抗偏離能力是很好的,輸出的推力或力矩基本上是恆定的,可以很好的克服介質的不平衡力,達到對工藝參數的準確控制,所以控制精度比氣動執行器要高。如果配用伺服放大器,可以很容易地實現正反作用的互換,也可以輕鬆設定斷信號閥位狀態(保持/全開/全關),而故障時,一定停留在原位,這是氣動執行器所作不到,氣動執行器必須藉助於一套組合保護系統來實現保位 。
執行機構
電動執行機構有二種類型,一般分為部分迴轉電動執行機構(Part-Turn Electric Valve Actuator),和多迴轉電動執行機構(Multi-Turn Electric Valve Actuator),前者主要控制需要部分迴轉的閥門 例如:球閥,蝶閥等,後者需要多圈數旋轉的閥門,例如閘閥等。
電力驅動的多迴轉式執行機構是最常用、最可靠的執行機構類型之一。使用單相或三相電動機驅動齒輪或蝸輪蝸桿最後驅動閥桿螺母,閥桿螺母使閥桿產生運動使閥門打開或關閉。多迴轉式電動執行機構可以快速驅動大尺寸閥門。為了保護閥門不受損壞,安裝在在閥門行程的終點的限位開關會切斷電機電源,同時當安全力矩被超過時,力矩感應裝置也會切斷電機電源,位置開關用於指示閥門的開關狀態,安裝離合器裝置的手輪機構可在電源故障時手動操作閥門。
這種類型執行機構的主要優點是所有部件都安裝在一個殼體內,在這個防水、防塵、防爆的外殼內集成了所有基本及先進的功能。主要缺點是,當電源故障時,閥門只能保持在原位,只有使用備用電源系統,閥門才能實現故障安全位置(故障開或故障關)。
這種執行機構類似於電動多迴轉執行機構,主要差別是執行機構最終輸出的是1/4轉記90度的運動。新一代電動單迴轉式執行機構結合了大部分多迴轉執行機構的複雜功能,例如:使用非進入式用戶友好的操作界面實現參數設定與診斷功能。單迴轉執行機構結構緊湊可以安裝到小尺寸閥門上,通常輸出力矩可達800公斤米,另外應為所需電源較小,它們可以安裝電池來實現故障安全操作。
選擇要素
選擇一台合適的閥門執行機構類型和規格時必須考慮下列要素:
驅動能源
最常用的驅動能源是電源或流體源,如果選擇電源為驅動能源,對於大尺寸閥門一般選用三相電源,對於小尺寸閥門可選用單相電源。一般電動執行機構可有多種電源類型供選擇。
有時也可選直流供電,此時可通過安裝電池實現電源故障安全操作。流體源種類很多,首先可以是不同的介質如:壓縮空氣、氮氣、天然氣、液壓流體等,其次它們可以具備各種壓力,第三執行機構具有各種尺寸以提供輸出力活力矩。
閥門類型
當選擇閥門用執行機構時,必須要知道閥門的種類,這樣才可以選擇正確的執行機構類型。有些閥門需要多迴轉驅動,有些需要單迴轉驅動,有些需要往復式驅動,它們影響了執行機構類型的選擇。通常多迴轉的氣動執行機構比電動多迴轉執行機構價格要貴,但是往復式直行程輸出的氣動執行機構價格比電動多迴轉執行機構便宜。
力矩大小
對於90度迴轉的閥門如:球閥、碟閥、旋塞閥,最好通過閥門廠商獲得相應閥門力矩大小,大部分閥門廠商是通過測試閥門在額定壓力下閥門所需的操作力矩,他們將這一力矩提供給客戶。
對於多迴轉的閥門情況有所不同,這些閥門可分為:往復式(提升式)運動-閥桿不旋轉、往復式運動-閥桿旋轉、非往復式-閥桿旋轉,必須測量閥桿的直徑,閥桿連線螺紋尺寸已決定執行機構規格。
執行機構選型
一但執行機構類型和閥門所需驅動力矩確定了,就可以使用執行機構廠商提供的數據表或選型軟體進行選型。有時還需考慮閥門操作的速度和頻率。
流體驅動的執行機構可調節行程速度,但是三相電源的電動執行機構只有固定的行程時間。
部分小規格的直流電動單迴轉執行機構可調節行程速度。
結構原理
以MD系列電動執行機構的整體式比例調節型為例。
MD系列電動執行機構以交流伺服電動機為驅動裝置的位皿伺服機構,由配接的位置定位器PM-2控制板接受調節系統的4~20mA直流控制信號與位置傳送器的位置反饋借號進行比較,比較後的信號偏差經過放大使功率級導通,電動機旋轉驅動執行機構的輸出件朝著減小這一偏差的方向移動(位置傳送器不斷將輸出件的實際位置轉變為電信號—位盈反饋信號送至位致定位器),直到偏差信號小於設定值為止。此時執行機構的輸出件就穩定在與輸人信號相對應的位置上。
組成部分
MD系列角行程調節電動執行機構由動力部件和位置定位器(PM-2控制板)兩大部分組成。其中動力部件主要由電動機、減速器、力矩行程限制器、開關控制箱、手輪和機械限位裝置以及位置傳送器等組成,其各部分作用簡述如下:
1、電動機
電動機是特種單相或三相交流異步電動機,具有高啟動力矩、低啟動電流和較小的轉動慣量,因而有較好的伺服特性。在電動機定子內部裝有熱敏開關(詳見圖3所示)做過熱保護,當電動機出現異常過熱(內部溫度超過130℃)時該開關將控制電動機的電路斷開以保護電動機和執行機構,當電動機冷卻以後開關恢復接通,電路恢復工作。為了克服慣性惰走,調節型電動執行機構的電動機控制電路均有電制動功能。
 角行程電動執行機構
角行程電動執行機構2、減速器
角行程執行機構採用行星減速加蝸輪蝸桿傳動機構,既有較高的機械效率,又具有機械自鎖特性。直行程執行機構的減速器由多轉執行機構減速器配接絲桿螺母傳動裝置組成。
3、力矩行程限制器
它是一個設定在減速器內的標準單元,由過力矩保護機構、行程控制機構(電氣限位)、位置感測器及接線端子等組成。
4、過力矩保護機構
內行星齒輪在傳遞力矩時產生的偏轉撥動嵌裝在齒輪外圈的擺桿,擺桿的兩端各裝有一個測力壓縮彈贊作為正、反向力矩的感測元件,當輸出力矩超過設定限制力矩時,內齒輪的偏轉使擺桿觸動力炬開關,切斷控制電路使電動機停轉。調整力炬限制彈資的壓縮量即可調整力炬的限定值。該保護具有記憶功能,對應於接線圖中的電器設備是力矩開關LEF、LEO。當該保護動作以後,在排除機械力矩故障後,執行機構斷電或信號瞬間反向一下即可恢復(即記憶解除)正常工作。
 電動執行機構和齒輪箱配套圖示
電動執行機構和齒輪箱配套圖示(1)行程控制機構:由凸輪組和微動開關組成。該凸輪組通過齒輪減速裝殷,與減速器傳動軸相連,通過調整分別作用於正、反方向微動開關(即行程限位開關)的凸輪板的位置可限定執行機構的行程(行程開關FCO,FCF)。該電氣限位的範圍在出廠時已經調好,一般情況下請勿隨便調整,以免損壞機構。
(2)位置感測器:採用高精度、長壽命的導電塑膠電位器作為位置感測元件,它與凸輪組同軸連線,整體式比例調節型電動執行機構位置指示信號,是將電位器隨輸出軸行程變化的電阻值送入PM-2控制板的比較放大電路,並由它送出一個4-20mA的DC電流信號用於指示。
5、開關控制箱
在開關控制箱內裝有PM電子位置定位器。
6、手輪
在故障狀態和調試過程中,可通過轉動手輪來實現手動就地操作。
7、機械限位裝置
主要用於故障時以及防止手動操作時超過極限位置保護。角行程電動執行機構的機械限位採用內置扇形渦輪限位結構,外形體積小,限位可靠;直行程電動執行機構的機械限位採用內置擋塊型限位結構,可十分有效地保護閥座、閥桿、閥芯。
位置定位器實質上是一個將控制信號與位置反饋信號進行比較並放大以控制電動機開停和旋轉方向的多功能大功率放大板,它與執行機構的動力部件相連以控制執行機構按系統規定的狀態工作。位置定位器主要由比較、邏輯保護、放大驅動及功率放大等電路組成。控制單相電動機的位置定位器功率放大部分主要由光電禍合過零觸發固態繼電器(無觸點電子開關)構成。其主體部分示意如圖4所示。需要注意的是“手動一自動”轉換開關,該開關的作用是在沒有外加信號時,與手動調整電位器P1配合使用,以便觀察或調試執行機構。用後一定要將其撥回“自動”位世,以免影響投人系統自動控制。
開關控制
自動控制閥
自動控制閥最大的好處是可以遠距離的操作閥門,這就意味著操作人員可以坐在控制室控制生產過程而不需要親臨現場去人工操作閥門的開和關。人們只需鋪設一些管線連線控制室和執行機構,驅動能源通過管線直接激勵電動或氣動執行機構,通常用的4-20mA信號來反饋閥門的位置。
連續控制
如果執行機構被要求用於控制過程系統的液位、流量或壓力等參數,這是要求執行機構頻繁動作的工作,可以用4-20mA信號作為控制信號,然而這個信號可能會和過程一樣頻繁的改變。如果需要非常高頻率動作的執行機構,只有選擇特殊的能頻繁啟停的調節型執行機構。當一個過程中需要多台執行機構時,可以通過使用數字通訊系統將各個執行機構連線起來,這樣可大大降低安裝費用。數字通訊迴路可以快速高效的傳遞指令和收集信息。有多種通訊方式如:FOUNDATIONFIELDBUS、PROFIBUS、DEVICENET、HART和專為閥門執行機構設計的PAKSCAN等。數字通訊系統不單單可以降低投資費用,它們還可以收集大量閥門信息,這些信息對於閥門的預測性維護程式非常有價值。
預測維護
操作人員可以藉助內置的數據存儲器來記錄閥門每次動作時力矩感應裝置測得的數據,這些數據可以用來監測閥門運行的狀態,可以提示閥門是否需要維修,也可以用這些數據來診斷閥門。
針對閥門可以診斷如下數據:
1.閥門密封或填料摩擦力
2.閥桿、閥門軸承的摩擦力矩
3.閥座摩擦力
4.閥門運行中的摩擦力
5.閥芯的所受的動態力
6.閥桿螺紋摩擦力
7.閥桿位置
上述大部分數據存在於所有種類的閥門,但著重點不同,例如:對於蝶閥,閥門運行中的摩擦力是可以忽略的,但對於旋塞閥這個力數值卻很大。不同的閥門具有不同的力矩運行曲線,例如:對於楔式閘板,開啟和關閉力矩都非常大,其它行程時只有填料摩擦力和螺紋摩擦力,關閉時,液體靜壓力作用在閘板上增加了閥座摩擦力,最終楔緊效應使力矩迅速增大直到關閉到位。所以根據力矩曲線的變化可以預測出將會發生的故障,可以對預測性維護提供有價值的信息。
注意事項
以MD系列電動執行機構的整體式比例調節型為例。
在通電前,必須進行外觀檢查和絕緣檢查,動力迴路(弧電迴路)及信號觸點對外殼的絕緣,用500V兆歐表測最不得低於20MΩ:信號輸人、輸出迴路及它們與動力迴路之間的絕緣,除特殊要求外,不應低於l0mΩ合格後方可通電。在通電後,應檢查變壓器、電機及電子電路部分元件等是否過熱,轉動部件是否有雜音,發現異常現象應立即切斷電源,查明原因。未查明原因前,不要輕易焊下元件。更換電子元件時,應防止溫度過高,損壞元件。更換場效應管和積體電路時一定要把電烙鐵妥獸接地,或脫離電源利用餘熱進行焊接。拆卸零部件、元器件或焊接導線時,應做好標記,對應記號。應盡公避免被檢設備的輸出迴路開路,避免被檢設備在有輸人信號時停電。檢修後的設備必須進行校驗。對乾電動機要檢查線圈對外殼及線圈之間的絕緣電阻,測皿線圈直流電組,清洗軸承並加優質潤滑油,檢查轉子、定子線圈及制動裝;對於減速器要解體清洗各部件,檢查行星齒輪部分的情況,檢查斜齒輪部分的情況,檢查渦輪渦桿或絲桿螺母的嚙合情況,最後進行裝配、調整並加長效鏗基潤滑脂。對於位置感測器部分要進行外觀檢查,檢查電位器與行程控制機構的同軸連線情況,檢查電位器的基本情況,檢查電位器及放大板之間的連線情況。
以在各種突發情況下的生產安全性為例。
在大型管網系統中,閥門分布較廣或較遠,為保證在各種突發情況下的生產安全性,閥門需要具有現地斷電後手動關閉門,並同樣能夠在現地顯示及遠程監控閥門開度的功能,這就需要電動執行機構具有自備電池低功耗手動模式,在現地斷電情況下進入手動模式,利用自備電池可以不僅僅是現地顯示閥門開度,同時能夠提供遠端閥門開度顯示起到遠程監控的作用。
低功耗手動模式,涉及到低功耗液晶屏技術、低功耗CPU技術、低功耗數據採集、計算、處理及傳送並低功耗電池供電技術,其中關鍵的是閥門開度感測器需要選用全行程的絕對值多圈編碼器。 實際上在手動模式情況下,因變化回響要求不高,MCU(微處理器)可以採取低功耗間隙式工作模式,也就是半休眠模式,這樣可以確保所耗功耗極低,自備電池容量能夠較長時間的使用。
當選用低功耗半休眠模式的功能,閥門開度感測器就要選用停電狀況下不影響位置記憶的感測器,例如電位器或全行程多圈絕對值編碼器。電位器的精度與測量行程有限,在電動執行器上的使用有兩種方法,一種是全行程用一次電位器行程(通過變速),斷電位置不會丟失,但是那樣精度很低;另一種是用多次電位器行程,位置精度是提高了,但是每次超出行程就要靠電子記憶實現,當斷電後沒有了電子記憶位置,如果用電池實現記憶,需耗費較多電池能量。如果用霍爾脈衝計數的方法,計數是實時不間斷的,斷電後用電池耗電記憶,電池容 量是不夠的。選用全行程多圈絕對值編碼器,是這種模式最可能實現的閥門開度感測器,當然,由於數據讀取時間極短而要保證數據的準確性,要求此編碼器的數據可靠性要求就很高了。有一些選用的絕對值編碼器是單圈功能的,超出單圈需要用電子計圈記憶,其斷電後的因需要計圈記憶的耗電較大,不適合這種半休眠低功耗模式。
全行程多圈絕對值編碼器採用RS485主動模式傳送數據,每隔8mS主動傳送一次,編碼器的通電啟動時間極短,數據含兩種校驗方式,可靠性高,由於是全行程多圈絕對值編碼器,在總行程中的每一個位置是唯一編碼的,與前次讀數無關而無需計數、計圈及記憶,所以可以採用間隙式通電、讀數的模式,比如每隔1—5秒時間,MCU主機板間隙式工作一次(或兩次),每次工作時間僅幾十毫秒,快速實現啟動、數據讀取、處理、傳送的工作,其餘時間處於休眠狀態,這就是“半休眠低功耗模式” 。
故障分析
以MD系列電動執行機構的整體式比例調節型為例。
1、位置感測器部分
(1)電動執行機構接受控制系統發出的開、關信號後,電機能正常轉動,但沒有閥位反饋。其可能原因是:
1)位置感測器的電位器與行程控制機構不能同軸旋轉,需檢查連線部分是否損壞;
2)電位器損壞或性能變壞,阻值不隨轉動而發生變化;
3)位置感測器的電位器及放大板間連線導線是否正常;
4)PM放大板是否損壞,有無反饋信號送出。
(2)電動執行機構接受控制系統發出的開、關信號後,電機能正常轉動,但閥位反饋始終為一固定值,不隨閥門的開、關而變化,其可能原因是:
1)導電塑膠電位器的阻值為一恆值,不隨轉動而變,檢修更換電位器;
2)放大板中有關部分異常,檢查處理。
2、執行器
執行機構接收控制系統發出的開關信號後,電機不轉並有嗡嗡聲。其原因可能是:
1)減速器的行星齒輪部分卡澀、損壞或變形;
2)減速器的斜齒輪傳動部分變形或過度磨損或損壞;
3)減速器的渦輪渦桿或絲桿螺母傳動部分變形損壞、卡澀等;
4)整體機械部分配合不好,不靈活,需調整加油。
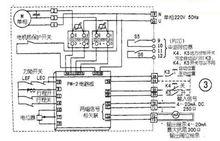 圖3
圖33、電氣部分故障
1)電動執行機構接受控制系統發出的開、關信號後,電機不轉,也無嗡嗡聲。可能原因是:沒有交流電源或電源不能加到執行機構的電機部分或位置定位器部分;PM放大板工作不正常,不能發出對應的控制信號;固態繼電器部分損壞,不能將放大板送來的弱信號轉變成電機需要的強電信號;電機熱保護開關損壞;力矩限制開關損壞;行程限制開關損壞;手動/自動開關位置選錯或開關損壞;電機損壞。
2)電動執行機構接受控制系統發出的開、關信號後,電機不轉,有嗡嗡聲。其可能原因是:電機的啟動電容損壞;電機線圈匝間輕微短路;電源電壓不夠。
3)電動執行機構接受控制系統發出的開、關信號後,電機抖動,並伴有咯咯聲,其原因可能是:PM放大板的輸出信號不足不能使固態繼電器完全導通,造成電機的載入電壓不足;固態繼電器性能變壞,造成其輸出端未完全導通。
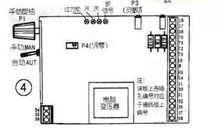 圖4
圖4傳統設備區別
從傳統觀念來看,氣缸與電動執行器一直被認為是屬於兩個完全不同領域的自動化產品,隨著電氣化程度的不斷提高,電動執行器卻慢慢浸入氣動領域,二者在套用中既有競爭又相互補充。在本期欄目中,我們將從技術性能、購買和套用成本、能源效率、套用場合及市場形勢等幾個方面來對比氣缸與電動執行器各自的優勢
1、技術性能的比較
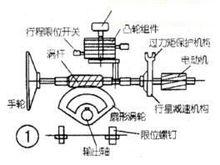 圖1
圖1眾所周知,相比電動執行器,氣缸可在惡劣條件下可靠地工作,且操作簡單,基本可實現免維護。氣缸擅長作往復直線運動,尤其適於工業自動化中最多的傳送要求——工件的直線搬運。而且,僅僅調節安裝在氣缸兩側的單向節流閥就可簡單地實現穩定的速度控制,也成為氣缸驅動系統最大的特徵和優勢。所以對於沒有多點定位要求的用戶,絕大多數從使用便利性角度更傾向於使用氣缸工業現場使用電動執行器的套用大部分都是要求高精度多點定位,這是由於用氣缸難以實現,退而求其次的結果。
而電動執行器主要用於旋轉與擺動工況。其優勢在於回響時間快,通過反饋系統對速度、位置及力矩進行精確控制。但當需要完成直線運動時,需要通過齒形帶或絲桿等機械裝置進行傳動轉化,因此結構相對較為複雜,而且對工作環境及操作維護人員的專業知識都有較高要求。
2、氣缸的優勢
(1)對使用者的要求較低。氣缸的原理及結構簡單,易於安裝維護,對於使用者的要求不高。電缸則不同,工程人員必需具備一定的電氣知識,否則極有可能因為誤操作而使之損壞。
(2)輸出力大。氣缸的輸出力與缸徑的平方成正比;而電缸的輸出力與三個因素有關,缸徑、電機的功率和絲桿的螺距,缸徑及功率越大、螺距越小則輸出力越大。一個缸徑為50mm的氣缸,理論上的輸出力可達2000N,對於同樣缸徑的電缸,雖然不同公司的產品各有差異,但是基本上都不超過1000N。顯而易見,在輸出力方面氣缸更具優勢。
(3)適應性強。氣缸能夠在高溫和低溫環境中正常工作且具有防塵、防水能力,可適應各種惡劣的環境。而電缸由於具有大量電氣部件的緣故,對環境的要求較高,適應性較差。
電缸的優勢主要體現在以下3個方面:
(1)系統構成非常簡單。由於電機通常與缸體集成在一起,再加上控制器與電纜,電缸的整個系統就是由這三部分組成的,簡單而緊湊。
(2)停止的位置數多且控制精度高。一般電缸有低端與高端之分,低端產品的停止位置有3、5、16、64個等,根據公司不同而有所變化;高端產品則更是可以達到幾百甚至上千個位置。在精度方面,電缸也具有絕對的優勢,定位精度可達¡0.05mm,所以常常套用於電子、半導體等精密的行業。
(3)柔韌性強。毫無疑問,電缸的柔韌性遠遠強於氣缸。由於控制器可以與PLC直接進行連線,對電機的轉速、定位和正反轉都能夠實現精確控制,在一定程度上,電缸可以根據需要隨意進行運動;由於氣體的可壓縮性和運動時產生的慣性,即使換向閥與磁性開關之間配合地再好也不能做到氣缸的準確定位,柔韌性也就無從談起了。
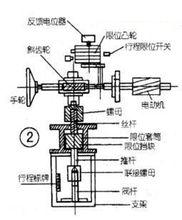 圖2
圖2技術指標
1、輸入信號:220V AC開關信號。
2、開度信號:4~20mA DC或0~1.0KΩ。
3、控制限位開關:開側 閉側。
4、開度檢測:精密導電塑膠電位器。
5、電源:220VAC±10% 50Hz。
6、驅動電機:交流可逆單相齒輪減速電機。
7、輸出力矩:250Nm(DKJ-3100),600Nm(DKJ-4100)。
8、輸出軸每轉時間:40-100s(DKJ)。
9、輸出軸有效轉角:900(DKJ)。
10、輸出軸推力:4000 N(DKZ-3100),6400 N(DKZ—4100)。
11、全行程時間:8-50s(DHZ)。
12、死區:≤300μA。
13、阻尼特性:出軸振盪≤三次“半周期”擺動。
14、基本誤差:±1.5%。
15、反應時間:≤1s。
16、使用環境溫度:-10~50℃ 。
