雷達隨動系統

各種雷達都有許隨動系統。但是,通常所說的雷達隨動系統是指各種跟蹤雷達中的天線角坐標跟蹤系統和距離跟蹤系統。
正文
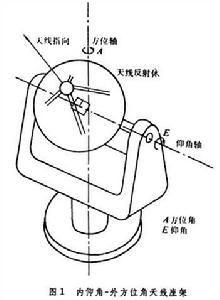 雷達隨動系統角坐標跟蹤系統 常規的跟蹤雷達通常使用內仰角-外方位角支架,以控制雷達天線在空間的指向(圖1)。因此,天線角坐標跟蹤系統也相應地由仰角跟蹤系統和方位角跟蹤系統兩部分組成。兩者的基本結構大體相同,只有內外框架因驅動條件的差別而有一些小的差別。圖2為現代跟蹤雷達的方位角跟蹤系統的原理框圖。
雷達隨動系統角坐標跟蹤系統 常規的跟蹤雷達通常使用內仰角-外方位角支架,以控制雷達天線在空間的指向(圖1)。因此,天線角坐標跟蹤系統也相應地由仰角跟蹤系統和方位角跟蹤系統兩部分組成。兩者的基本結構大體相同,只有內外框架因驅動條件的差別而有一些小的差別。圖2為現代跟蹤雷達的方位角跟蹤系統的原理框圖。 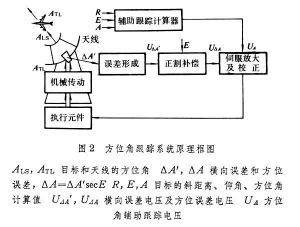 雷達隨動系統天線系統使雷達波束相對天線指向線形成一定的偏移組合(如使波束作圓錐掃描、順序偏移,或幾個偏移接收波束同時接收等),以便從目標回波中提取目標方向與雷達天線指向之間的角度誤差信息,並分解成橫向誤差和縱向誤差兩部分,經雷達接收機放大。其中,縱向誤差電壓與天線仰角誤差成正比。由於測量是在內框架上進行,而方位角是外框架的轉角,因此橫向誤差電壓要乘以天線仰角的正割值後才與方位誤差成正比。這一乘法步驟通常稱為正割補償。角誤差電壓加在相應的伺服放大器上,經放大後啟動執行元件,通過機械傳動消除角誤差,使天線指向與目標方向一致,完成天線對目標的角坐標跟蹤。執行元件可以是伺服電動機,也可以是液壓馬達。伺服放大器通常具有高倍率的電壓和功率放大作用,並包含天線轉速、力矩等輔助反饋環路,與良好的傳動結構設計配合可保證良好的驅動性能。伺服放大器的大功率末級,可以使用電機放大器、可控矽放大器、磁放大器或電晶體放大器。執行元件如為液壓馬達,則應有相應的電-液轉換、液壓放大器等部件。
雷達隨動系統天線系統使雷達波束相對天線指向線形成一定的偏移組合(如使波束作圓錐掃描、順序偏移,或幾個偏移接收波束同時接收等),以便從目標回波中提取目標方向與雷達天線指向之間的角度誤差信息,並分解成橫向誤差和縱向誤差兩部分,經雷達接收機放大。其中,縱向誤差電壓與天線仰角誤差成正比。由於測量是在內框架上進行,而方位角是外框架的轉角,因此橫向誤差電壓要乘以天線仰角的正割值後才與方位誤差成正比。這一乘法步驟通常稱為正割補償。角誤差電壓加在相應的伺服放大器上,經放大後啟動執行元件,通過機械傳動消除角誤差,使天線指向與目標方向一致,完成天線對目標的角坐標跟蹤。執行元件可以是伺服電動機,也可以是液壓馬達。伺服放大器通常具有高倍率的電壓和功率放大作用,並包含天線轉速、力矩等輔助反饋環路,與良好的傳動結構設計配合可保證良好的驅動性能。伺服放大器的大功率末級,可以使用電機放大器、可控矽放大器、磁放大器或電晶體放大器。執行元件如為液壓馬達,則應有相應的電-液轉換、液壓放大器等部件。
對天線角坐標跟蹤系統的主要性能要求,是使天線角位置準確而連續地跟蹤快速變化的目標角位置。例如,精密跟蹤雷達通常要以 0.1弧分量級的精度跟蹤以幾度每秒的角速度運動的目標;火控雷達要以弧分量級的精度跟蹤以幾十度每秒的角速度運動的目標。為達到這樣的要求,必須有高精度的機械結構和良好的線路設計,以保證隨動系統有快速回響目標運動的能力,也就是回響頻寬要寬。但由於角坐標跟蹤系統的誤差信息是從雷達接收機接收的目標回波中提取的,運動目標的複雜表面不僅使反射回波振幅急劇起伏,而且使回波視在中心也在目標幾何中心周圍急劇跳動(角閃爍),加上接收機高倍率放大引入的接收機噪聲的作用,使測得的誤差信息中包含大量的干擾成分。若隨動系統回響頻寬過寬,天線將隨目標回波視在中心的跳動和接收機的噪聲作用而急劇擺動,反而不能穩定地對準目標幾何中心位置,跟蹤精度便會急劇下降。因此,雷達隨動系統不能像一般隨動系統那樣單純依靠加寬系統回響頻寬的辦法來提高對快速機動目標的跟蹤能力。早期的跟蹤雷達隨動系統只能按目標運動參數(機率統計)和干擾的統計特性進行折衷設計。後來出現了按不同航路段用人工輔助控制頻寬和利用目標斜距離自動調整系統回響頻寬來提高跟蹤精度的方法。60年代,隨著目標機動性的提高,火控雷達中首先使用了再生反饋技術。70年代。隨著數位技術的發展,跟蹤雷達廣泛採用了以卡爾曼濾波技術為主的現代濾波器輔助跟蹤技術。雷達隨動系統對更為複雜的航路機動的目標,也能達到良好的跟蹤效果。圖2中的輔助跟蹤計算器,就是這種類型的輔助跟蹤電壓產生器。 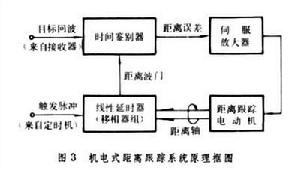 雷達隨動系統距離跟蹤系統 距離跟蹤系統是典型的雷達隨動系統。目標到雷達站的斜距離與目標回波相對發射脈衝的時間延遲成正比。跟蹤雷達通常採用機電式距離跟蹤系統(圖3)進行連續跟蹤式距離測量。在這種系統中,距離跟蹤電動機經機械軸(距離軸)帶動一套線性延時裝置,產生一個延遲脈衝(距離波門)。這一脈衝相對發射脈衝的延遲時間與機械轉角成正比,時間鑑別器比較目標回波和延遲脈衝的時間差(即距離軸標定距離和目標真實距離的誤差),並變成距離誤差電壓,經伺服放大器控制距離跟蹤電動機,移動距離波門對準目標回波。這樣,距離軸的位置就同目標斜距離相對應。因此,距離跟蹤系統也是通過目標回波完成系統誤差測量的。回波信號幅度起伏、距離閃爍和接收機噪聲,同樣也給距離跟蹤系統引入干擾。因而也要採用與角跟蹤系統類似的手段,提高距離跟蹤系統對距離上迅速變動的目標的精確跟蹤能力。
雷達隨動系統距離跟蹤系統 距離跟蹤系統是典型的雷達隨動系統。目標到雷達站的斜距離與目標回波相對發射脈衝的時間延遲成正比。跟蹤雷達通常採用機電式距離跟蹤系統(圖3)進行連續跟蹤式距離測量。在這種系統中,距離跟蹤電動機經機械軸(距離軸)帶動一套線性延時裝置,產生一個延遲脈衝(距離波門)。這一脈衝相對發射脈衝的延遲時間與機械轉角成正比,時間鑑別器比較目標回波和延遲脈衝的時間差(即距離軸標定距離和目標真實距離的誤差),並變成距離誤差電壓,經伺服放大器控制距離跟蹤電動機,移動距離波門對準目標回波。這樣,距離軸的位置就同目標斜距離相對應。因此,距離跟蹤系統也是通過目標回波完成系統誤差測量的。回波信號幅度起伏、距離閃爍和接收機噪聲,同樣也給距離跟蹤系統引入干擾。因而也要採用與角跟蹤系統類似的手段,提高距離跟蹤系統對距離上迅速變動的目標的精確跟蹤能力。
與機電移相延時電路相比,數字式延遲電路具有快速、靈活、精確等特點而且經濟。因此,在大多數現代跟蹤雷達中,電子數字式距離跟蹤電路已取代了機電式距離跟蹤系統。配圖
相關連線
