
正文
與控制對象只存在單向作用而沒有反饋聯繫的控制電路。例如晶閘管供電的直流電動機開環控制系統(圖1)。Ug作為系統的輸入量,經過觸發電路控制著晶閘管整流電路的輸出電壓,從而控制了電動機的轉速,轉速n稱為輸出量。這樣,一定輸入量Ug對應著一定的轉速n。由圖可見,該系統只有輸入量對輸出量的控制作用,而沒有輸出量再返回來影響系統控制作用的能力,這種系統叫開環控制系統。在忽略了一些次要因數後,可寫出方程式聯立求解上述方程可得轉速n的表達式,即為開環系統的機械特性方程式式中Kc為晶閘管整流電路的放大係數,R∑為電樞迴路總電阻,Ce為電動機的電動勢係數,n0為開環系統電動機的理想空載轉速,Δn為開環系統電動機的靜態轉速降。根據系統各環節的靜態關係可以畫出開環系統靜態結構圖(圖2)。從結構圖可以看出,在控制通道中,只有輸入量Ug對輸出量n產生控制作用。電樞壓降IdR∑是負載擾動,當負載擾動IdR∑變化時,如果沒有人工干預,則輸出量n必將改變。這說明開環系統抗擾動能力是很差的,它對控制過程中可能出現的偏差沒有任何修正能力。因此它的控制精度較低,常用在要求不高的場合。
閉環控制電路
閉環控制電路是指與控制對象存在反饋聯繫的控制電路。開環控制電路結構簡單,成本低,但控制精度較低。為在系統中保持轉速的恆定,可以加入一些測量比較元件組成閉環系統。
與控制對象存在反饋聯繫的控制電路。開環控制電路結構簡單,成本低,但控制精度較低。為在系統中保持轉速的恆定,可以加入一些測量比較元件組成閉環系統(圖1)。
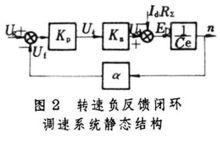
閉環控制測速發電機SF(圖中TG)就是測量元件。將測速發電機的電壓取出一部分Uf與給定電壓Ug反向串聯,並將差值ΔU作為放大器的輸入信號,即ΔU=Ug-Uf。自動調速過程如下:設電動機(M)原來穩定工作於額定轉速,若負載突然增大,主迴路電壓降增大,電動機轉速下降,反饋電壓Uf也隨之下降。由於給定電壓Ug沒有變,所以加到放大器輸入端的電壓ΔU 便自動升高,它使晶閘管整流電路輸出電壓Ud增加,補償了所增大的電壓降,於是電動機轉速又回升到接近原來的數值。反饋作用有兩種情況,若反饋信號和原輸入信號極性相同叫正反饋;反之,叫負反饋。正反饋使系統放大倍數增大,負反饋使系統放大倍數減小。在自動控制系統中主要套用的是負反饋。在單閉環調速系統中,忽略一些次要因數後,各環節的靜態(穩態)規律如下:電壓比較環節ΔU=Ug-Uf;放大器Uk=KpΔU;觸發器及晶閘管整流裝置Ud=KsUk;晶閘管-電動機系統開環機械特性n=(Ud-IdR∑)/Ce;測速發電機Uf=αn。以上各式中,Kp是放大器的電壓放大倍數;Ks是晶閘管裝置的電壓放大倍數;α 是測速發電機的反饋係數。上述關係式中消去中間變數,可得轉速負反饋單閉環調速系統的靜特性方程式 。
 開環控制電路
開環控制電路式中K=KpKsα/Ce,叫做閉環系統的開環放大倍數,它好象是在測速發電機輸出端把反饋迴路斷開,從放大器輸入一直到測速發電機輸出的總的電壓放大倍數,是各個環節單獨放大倍數的乘積。這裡是以1/Ce=n/ED作為電動機環節的“放大倍數”的。
 開環控制電路
開環控制電路閉環調速系統的靜特性根據調速系統各環節的靜態關係式可以畫出系統的靜態結構圖(圖2)。圖中各方塊中的符號是該環節的放大倍數
分別表示開環和閉環系統的機械特性。可見,只要系統的開環放大倍數K足夠大,總可以把閉環系統的靜態轉速降Δпb減小到允許的範圍,並把調速範圍提高到預定的要求。
