
發展概況
1948年R.C.格爾茨根據比例繪圖儀的原理設計出一種機械式遙操器,輔助放射性高溫實驗室的工作。1954年在此基礎上作了改進,控制端與被控端之間的聯接改用電氣方式,因而有可能設計出體積更大、功率更強的遙操器,並從位置控制轉向速率控制,從而提高控制能力。早期的速率遙操器都是採用逐點控制,這種控制方式既緩慢又不靈活。後來遙操器改用計算機控制,很容易控制精確的位置坐標。這項技術已被用於太空梭的遙操器上。微型遙操器(如用於眼、耳、鼻等微外科手術的遙操器)常用逐點速率控制方法。監控遙操器又稱監視控制操縱裝置,是一種具有記憶和學習能力的遙操器,一般就是具有機器視覺功能的控制計算機系統。它不僅能實現位置比例控制,而且能理解運行的模型,並有一定的記憶能力,能自動重複操作。當視覺反饋系統不清楚或需要重複操作時,它能在一段時間內不需要人的干預而自行工作。這種系統尚處於研製階段。
構造原理
遙操器由控制端、信道和被控端組成。控制端包括操縱員、控制手柄、控制台和視覺反饋裝置等,被控端包括控制指令裝置、操縱器(即機械手)和被操縱對象等。控制端與被控端相隔一定的距離,常有保護隔離板妨礙直接目視,或因距離太遠而使目視受到限制,因此控制端與被控端之間必須有信息傳遞。控制指令由控制端流向被控端,力的信號和視覺信號由被控端流向控制端(見圖)。視覺信號可來自直接目視和電視兩種方式。在大型遙操器中電視攝像機被安裝在機械手的臂、肘、腕等部位,使操縱員能從不同的角度觀看。觸感或力感則通過機械結構或電機來實現。遠距離的機械手施力時,操縱桿給操縱員的手一個反向作用力,使他有力的感受。遙操器與工業機器人不同,它是由人直接控制的,人要移動控制手柄或啟動開關來操縱被控對象。
套用
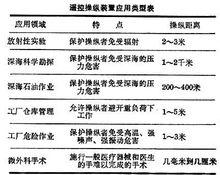 遙控操縱裝置套用類型表
遙控操縱裝置套用類型表太空梭上用遙操器來回收人造地球衛星。電視攝像機被安裝在機械手的抓指、臂、腕等部位,操縱員可以在機艙內的電視螢幕上觀察到遙操器和被控對象的狀態,利用手動操縱手柄對被控對象進行操縱,觸覺和力感則直接由機械或電機傳遞。遙操器還可以用於操縱和控制放射性物質,深海科學勘探,深海石油作業,工廠倉庫管理,工廠危險作業和施行微外科手術等方面。遙操器的各種套用見下表:
