
簡介
定義
網路及遠程操作技術的不斷發展帶動了遠程控制系統的套用,尤其是在工業控制領域,其不僅成本低、安裝簡單、維護便捷,還實現了遠程操控及資源共享,因此,在車輛控制領域具有極大的套用價值。
遠程控制有效實現了“一對多”,用戶可利用一台計算機對多台遠程計算機進行控制,用戶無需對所有計算機進行數據機的設定,只需利用區域網路,即可實現多點控制,而用戶即此區域網路的管理人員,不僅省去了多台數據機,還提高了安全性及可靠性,易於管理。
遠程操縱車輛時,先執行客戶端程式,向汽車進行控制信號的傳送,構建起一個遠程服務,再利用該遠程服務中的各類控制功能,成功將操縱指令傳送出去,指揮汽車中所有應用程式的各種運行。此方式即建立在遠程服務基礎上的遠程控制,利用遠程控制軟體在計算機間構建了一條有序的數據、信息交換通道,控制端通過此通道可以向汽車傳送控制指令,操縱汽車完成所有工作。在控制端會對遠程被控制端的執行結果進行顯示,程式運行所需資源都由被控計算機提供。
研究背景
當前,全球的計算機網路以及技術、感測器技術、電子技術都在迅猛發展,將其套用到汽車技術中,使得汽車電子控制技術也在不斷地成熟和完善,汽車電子控制技術在汽車業的廣泛套用和發展,使得電子裝置更加的標準化,從而實現了現代汽車的電子化。汽車電子控制技術不僅有利於改善汽車的各種性能,比如,經濟性、動力性、環保性、安全性以及行駛過程中的舒適性,推動汽車產業的發展而且還有利於電子產業的發展,所以汽車電子控制技術有利於汽車電子化的快速發展,它也是汽車工業不斷發展的關鍵。
汽車電子技術是在電子技術迅速發展的基礎上建立起來的,當前由於汽車上的電子控制單元越來越多,因此連線的導線也越來越多,這時就出現了一些問題,就必須要解決好控制單元的通信問題以及導線的成本問題。
研究現狀
車聯網是物聯網技術在智慧型交通系統中的套用,它提供與車輛安全相關的遠程控制服務、遠程車輛定位、車況查詢等,是重點關注的服務類型。同時智慧型手機套用到車聯網服務中,成為一種發展趨勢。現有的OnStar手機套用包括車況、遙控、助手三大服務,其中遙控包括遠程車門鎖的開啟與關閉,遠程啟動車輛,遠程雙閃燈或鳴喇叭(提示車輛位置)。寶馬的Connected Diver可以在使用車輛前,預先遠程開啟空調,以及提供車輛遠程定位。這些遠程控制服務使車輛變得更加智慧型,同時為用戶帶來安全,便捷的駕車體驗。目前遠程控制系統架構主要有C/S (Client/Server)架構和B/S (Browser/Server)架構。其中C/S架構是指客戶端向用戶提供操作界面,接受用戶輸入信息請求,然後向伺服器端傳送數據,並將伺服器回響的結果反饋給用戶。關於C/S架構套用主要有:
採用C/S架構遠程控制機器人,可以實現遠程控制,但需專門開發客戶端軟體,造成客戶端類型受限,擴展性不強;採用C/S架構通過PC端採用PPP協定遠程控制和監控飛艇,PPP協定只是針對點對點通信,協定兼容性不強,也需開發客戶端軟體。相比於C/S架構,B/S架構的客戶端簡化成一個WeB瀏覽器,相應的邏輯被集中起來,置於遠程伺服器上,減少了維護成本,這樣系統更穩定。
關於B/S架構套用主要有:設計了B/S架構,使用簡單的網路管理協定遠程控制和監控實驗室的電腦和通信設備,雖然客戶端軟體不需開發,但協定對於查詢以及返回的數據包等格式沒有明確定義,不標準;採用B/S架構,用戶通過控制台發出控制命令,經控制中心轉發給被控設備,執行控制命令,系統架構針對特定需求而設計,不開放.
操作功能及套用
遠程操作與信息傳輸技術解決了在現場辦公人員出去執勤車輛內無人的情況下,由控制室內操作人員遠程打開車內相關設備並將現場監控信息傳回控制室內,供相關人員觀看分析。
遠程控制
當現場車輛內無人時戶控室人員通過在上位機上操作腔制車輛現場設備啟停、升降、翻轉。遠程操作攝像頭工作及時了解現場信息和工作狀況。
信息傳輸
現場車輛工況可由安裝在車輛各處的信息採集點將車輛運行狀況採集到P L C 存儲器內。此類信息和現場攝像頭採集信息經由Internet網路傳送至中控室內便於及時掌控各現場工作信息和狀況。
CAN匯流排遠程操作
概述
 汽車CAN匯流排內部區域網路
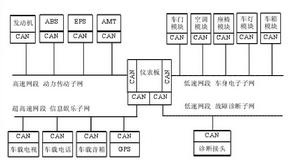
汽車CAN匯流排內部區域網路汽車電子控制技術包括多種技術比如:發動機的電子燃油控制技術,巡航系統,汽車的AMT、EPS以及ABS控制器,車載電話、電視、音響等技術,在電控單元之間的數據交換技術,數據及時通信技術等。CAN匯流排當前有著良好的發展前景,是電子控制網路的主要發展的方向。電子控制技術在不斷地套用到汽車製造的過程中,比如,自動變速箱、發動機電控、主動或半主動懸架、防抱死、安全氣囊等,這樣就使得汽車在電子控制上形成網狀的相互聯繫的局面,CAN組建出的區域網路如圖所示。
選用標準
不同的電子控制裝置在數據傳輸速率方面的要求是不同的,對CAN匯流排的選用標準也是不同的,一些常用的標準如下:
⑴動力傳動子網。對於動力傳動子網的的各種裝置如:變速箱、發動機以及制動裝置收集到的是速率較高的感測器的信號,這就需要高速的TTCAN和CAN來將感測器的信號來傳送出去,這種高速的TTCAN和CAN是以J2284、J1939以及ISO11898的標準組建起來的,只有這樣才能實現及時的動態控制。
⑵車身電子子網。在車身系統中的控制裝置也是比較多的,比如對座椅的控制、對轉向燈的控制,對示寬燈的控制、對剎車燈的控制、對車門的控制、對汽車儀表燈的控制,這些控制裝置需要較多的布線,所以在車身電子子網中需要利用低速容錯的CAN來增加系統的抗干擾性和不斷地增長傳輸的距離,所以這就需要在J2284以及ISO 11519-2的標準上來建立低速容錯CAN。
⑶故障診斷子網。當前在診斷故障子網這一模組上,已經出現了可以發展成為汽車產業診斷故障的通用標準的J2480以及ISO/DIS 15765的通信協定。
結構及功能分析
(1)控制系統的心臟是中央控制模組,這一模組可以控制車輛的所有系統,它的運作原理是由CAN匯流排將所有系統的開關量、脈衝量、模擬量等收集起來通過處理器集中運算,分析處理,最終再由CAN匯流排來發出具體的控制指令,來對整個車輛的系統進行控制。
(2)對點火時刻進行有效控制就要通過電子點火系統控制模組,這一模組的工作原理是利用高精度的曲軸位置、負荷、排氣含氧、易燃、進氣溫度、冷卻水溫等不同的感測器,通過專門的微處理晶片來對點火的順序與時刻進行控制,實現對點火的有效控制。
(3)對燃油的控制主要是利用制燃油供給系統模組,這一模組主要被引用到電子汽油噴射系統和電子石化油系統中,它的工作原理是通過電子點火系統、氣流量、燃油液位的感測器來對燃油進行控制,來達到節約用油、節約資源、科學環保的目的。
(4)動力終端與開關量控制模組是用來對發動機的油壓、油溫、水溫以及傳動箱的油壓的測控,它的工作原理是該模組對火焰感測器對點火狀態檢測時所形成的數據以及發動機轉動時的數據,車門、車燈、窗等的信號所傳輸的數據在經過PCI18F458單片機晶片的處理和分析後,最後經過CAN匯流排的控制器將其送到匯流排,來實現與中央控制模組的通信。
(5)減速和差速的控制上會運用到制動防抱死控制模組,它的工作原理是利用轉速感測器以及高速電磁閥等來對車輛進行控制,這樣可以對車輛的啟動和加速時車輪打滑進行有效地控制防止在制動的過程中出現車輪抱死、方向失控、車輪打滑、甩尾等現象的出現。
(6)電動助力轉向系統模組主要是利用車的外部條件來對車的轉向助力進行調節,從而使得轉向功能得到最最佳化。
(7)安全氣囊觸發裝置、氣囊以及氣體發生器構成了安全氣囊系統模組。安全氣囊的觸發裝置主要由監控裝置、電子控制裝置、感測器、儲備電源組成。這一模組的工作原理是由加速感測器來發出信號,電子控制系統接受信號並分析處理,如果是發生事故,則會對氣體發生器發出吹脹氣囊的命令,整個過程的用時是非常短的。觸發裝置會處在一個監控的狀態來保障氣囊時刻處在待工作的狀態下。
(8)懸掛控制系統模組主要是對車輛的懸掛的剛度和阻尼功能進行調節,具體說就是對監控裝置、加速度感測器、制動壓力感測器、控制裝置、車身位移感測器、側向加速度感測器、以及高性能液壓組件的調節控制。以此來提高車輛的車身狀況,保障行駛時的穩定和乘坐的舒適度。
(9)電子自動換檔系統模組就是運用電子裝置,使電磁閥和氣動伺服機構充分協調工作,從而使車更加容易的操作,保障車輛行駛的安全性。
(10) 汽車人機界面模組就是指人和車輛之間的互動交流,汽車的相關信息以及運行狀況通過顯示屏來顯示出來,使得車主可以通過顯示出的信息對車的狀況一目了然,有利於發現故障,對車的某些參數得到有效方便的限制。
(11)儀表指示模組是通過各種儀表輸出的信號對車輛的狀態進行控制,比如,水溫、氣壓、里程、速度、油量等儀表會輸出一些數據,通過這些數據就可以很好地對車輛進行控制。
