
簡介
遠程輸入設備使遠離計算機的用戶能對遠處的計算機進行批量輸入作業。這種設備的最簡單的結構由一台印表機、一台卡片閱讀機及其通信控制處理機組成。由於通信線路中的信息是以串列方式傳輸的,設備中的通信控制處理機需要將輸入到計算機的信息由並行轉變為串列而送入通信線路,並將通信線路中送來的信息由串列變為並行後輸出;此外還需要按規定的通信規程對信息的傳輸和糾錯等處理工作進行監控。
遠程設備信息自動輸入轉換系統
為實現控制距離遠,精度高,必須提高遠程設備信息的精度,因存在多個系統之間的通信問題,有時採用人工方式鍵入遠程指示信息,在數據量大的情況下,導致信息鍵入失誤率上升。為提高鍵入遠程設備信息的精度,研究實現了基於ARM的遠程設備信息的自動輸入轉換系統,遠程設備信息通過RS485協定方式傳榆至本系統,系統解析信息協定、分析數據,並將得到的鍵盤滑鼠數據以PS2鍵盤協定和串口滑鼠協定轉發給控制系統。在實際演練中,遠程設備信息自動輸入轉換系統提高了信息的鍵入精度,為控制自動化提高了效率。
系統工作原理
系統實時接收鍵盤、滑鼠命令,向計算機主機進行轉發,實現鍵盤、滑鼠正常信息輸入;在外部設備的控制下自動完成鍵盤、滑鼠信息傳輸通道切換,並接收外部設備傳送的指示信息,模擬生成計算機主機可以接收的信息並按照設計的時序傳送至計算機主機,實現遠程設備信息中各項參數的模擬鍵人;實現參數鍵入後,及時將控制權交還給鍵盤、滑鼠,恢復正常操控功能。
總體框架
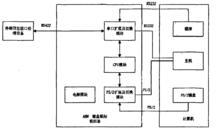 基於的ARM的遠程設備信息自動輸入轉換系統結構框圖
基於的ARM的遠程設備信息自動輸入轉換系統結構框圖系統的結構框圖如圖所示。
遠程設備信息自動輸入轉換系統工作流程如下:
第一步,在未收到遠程設備信息時,模擬器對鍵盤、滑鼠進行實時轉發,完成鍵盤、滑鼠命令信息輸入;
第二步,在需要輸入遠程設備信息時,首先進入需要輸入遠程設備信息的頁面,在遠程設備信息處理設備上輸入需要傳送的遠程設備信息批號,並確認傳送;
第三步,遠程設備信息處理設備將遠程設備信息的內容和需要輸入的位置信息按照規定的接口協定傳送給模擬器;
第四步,模擬器在收到遠程設備的信息後,自動進行鍵盤、滑鼠信息傳輸通道切換,禁止原有鍵盤、滑鼠傳輸通道,接通模擬鍵盤、滑鼠通道;
第五步,模擬器首先控制滑鼠指針移到螢幕左上角位置(0,0)像素點上,然後調用滑鼠最優移動算法將滑鼠指針移動到指定位置像素區域,並模擬單擊指令,選中需要輸入的數據;
第六步,模擬器將接收到遠程設備信息的鍵盤碼轉換成符合專用鍵盤格式的掃描碼數據,完成遠程設備信息的自動鍵入;
第七步,數據輸入完成後,模擬器控制將鍵盤、滑鼠信息傳輸通道切換回原來狀態,恢復鍵盤、滑鼠正常操控功能。
系統的硬體設計
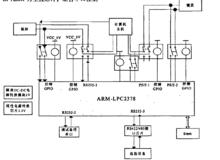 遠程設備信息自動輸入轉換系統邏輯原理圖
遠程設備信息自動輸入轉換系統邏輯原理圖遠程設備信息自動輸入轉換系統可採用成熟的接口電路技術,以ARM為主控晶片,結合串口控制晶片、DC、DC電源轉換模組、繼電器晶片等一些專用接口晶片和外圍電路實現。遠程設備信息自動輸入轉換系統邏輯原理圖如圖所示。
在鍵盤、滑鼠模擬器中,ARM作為主控晶片完成遠程設備信息的接收和傳送應答,實現鍵盤、滑鼠輸人的切換,並把遠程設備信息模擬轉發給本地計算機。
系統在不通電的情況下,鍵盤輸人和模擬鍵盤輸出直接連通,當外部設備輸入信息後,切換繼電器輸出引腳,實現遠程設備信息解析並按照PS/2協定轉發給本地計算機。信息傳送完畢後,切換繼電器,恢復鍵盤輸入和模擬鍵盤輸出直接連通狀態。鍵盤輸入和模擬鍵盤輸出同時通過繼電器切換和ARM晶片連線,實現信息的轉發。
系統在不通電的情況下,滑鼠輸入和模擬滑鼠輸出直接連通。當外部設備輸入信息後,切換繼電器輸出引腳,實現遠程設備信息處理轉發給本地計算機。信息傳送完畢後,切換繼電器,恢復滑鼠輸入和模擬滑鼠輸出直接連通狀態。
基於TCN網路的遠程輸入輸出設備
列車控制網路(簡稱TCN)是集整車控制、監測和故障診斷於一體的分散式列車控制系統。通常,基於TCN構架列車控制網路設備包括網關(GW)、列車控制單元(VCU)、遠程輸入輸出模組(RIOM)、中繼器(REP)等。RIOM是列車為VCU執行信號採集,並輸出命令到執行機構的功能模組。
國外對RIOM的研究已經取得諸多成果,如Siemens公司的SIBAS系統、Adtrantz公司的MICAS系統、ALSTOM公司的AGATE系統中,都包含RIOM或其他功能類似的模組單元。國內對列車網路設備的研究起步則較晚。
功能分析
TCN網路中的智慧型設備(如制動控制單元)通過MVB接口直接接入列車控制網路與VCU通信,而非智慧型設備需要通過RIOM與TCMS的系統接口,接入TCN網路執行VCU信號採集命令和數據輸出命令。RIOM被分布在每節車輛中,通過數位訊號量、模擬電壓/模擬電流環信號與輔助控制單元(ACU)、充電機、門控單元、空調控制單元等中壓系統以及部分牽引和制動控制信號通信,完成列車非智慧型單元子系統的配置管理、狀態採集和故障診斷等任務。
整體構成
針對列車控制網路非智慧型設備接入TCN網路的需求,設計了包含電源單元、主控制單元、MVB通信單元、IO通信單元的通用RIOM設備,為列車非智慧型設備接入TCN網路提供110V開關量的輸入/輸出、0~20mA電流環輸入/輸出型接口。
RIOM系統包括5個基本單元:CPU單元、MVB通信單元、DIO單元、AIO單元和電源單元。系統採用在航空航天、軍事工業等廣泛採用的高可靠性VME匯流排作為背板匯流排,實現高可靠性數據交換。各個子單元功能介紹如下:
1)CPU單元
CPU單元是RIOM的核心處理設備,主要實現VME匯流排數據傳輸主設備功能,並提供乙太網、RS232等人機互動接口。
CPU單元主控制器採用基於PowerPC架構的MPC8245處理器,最高主頻可達400MHz,並支持32位PCI匯流排(33MHz)。採用可程式邏輯器件FPGA設計PCIVME橋接電路,實現MPC8245處理器與VME匯流排的8/16位數據、16/24位地址訪問模式,並配置為VME匯流排主設備,控制DTB周期的數據傳輸邏輯。
CPU單元搭載嵌入式實時作業系統VxWorks。該系統本身的開銷很小,採用精練而有效的進程調度、進程通信和中斷處理程式,在實時性和可靠性方面十分適合實時性要求極高的列車控制網路。CPU單元通過地址映射的方式,將VME匯流排地址與片內記憶體地址一一對應,實現上位機軟體的數據訪問通信控制。
2)MVB通信單元
MVB通信單元是RIOM設備與列車控制網路通信的接口,實現MVB數據到VME數據的信號和協定轉換。MVB通信單元採用2片FPGA作為核心控制單元,其中MVB_FPGA嵌入具有自主智慧財產權的MVBC軟核,實現IEC61375-1中規定的數據傳輸和匯流排管理功能;VME_FPGA採用硬體描述語言,實現IEEE1014—1987標準中VME從設備的功能,並負責2片FPGA的數據通信。VME通信採用有限狀態機,實現匯流排數據的可靠傳輸。
3)DIO/AIO單元
DIO單元包括DI和DO兩類通信板,AIO單元包括AI和AO兩類通信板,主要負責RIOM與非智慧型設備的數字量、模擬量通信,如門隔離信號、充電機啟動信號、司機手柄信號以及列車網路信息採集的各類感測器信息等的通信。
IO單元均採用FPGA作為核心控制單元,完成數字量、模擬量信號與VME匯流排的數據通信任務。片內拓展64位元組的RAM作為數據儲存和其他控制參數的存儲空間。CPU單元可以根據板卡硬體地址配合地址偏移對IO內部存儲器進行讀取。
4)電源單元
電源單元負責給整個RIOM系統進行供電。根據標準IEEE1014—1987,設計5V、±12V規格的電源。電源單元設計有浪涌保護、諧波控制及過流保護電路。
關鍵功能實現
1VME匯流排接口設計
VME匯流排是廣泛套用於交通控制系統、武器控制系統、交通交換系統、數據採集系統等各個領域的工業現場匯流排。VME匯流排具有可靠性高、實時性好、抗電磁干擾能力強等優點,在高性能背板匯流排套用中已經占據主導地位。但是VME匯流排接口晶片由Cypress,Motorola等幾家公司壟斷,其主要產品只支持某些系列的控制器,通用性和靈活性都受到了很大的限制。
RIOM設備中每一塊電路板的VME匯流排接口都由一塊FPGA實現,系統採用一主多從A16:D16的通信模式。通信模式,CPU板的VME接口配置為VME匯流排主設備,其餘各功能板配置為VME匯流排從設備。為保證VME匯流排工作邏輯的可靠性及實時性,VME匯流排接口邏輯設計完全採用硬體描述語言(VerilogHDL)通過有限狀態機實現。
2開關量通信設計分析
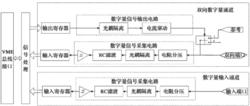 數字量通信通道設計結構框圖
數字量通信通道設計結構框圖圖所示為開關量通信通道設計結構框圖。在開關量通信模組中,一類為輸入連線埠,用於只需要採集輸入狀態的數字量信號;另一類為可以通過處理器對連線埠方向進行配置的雙向輸出連線埠,既可以用於輸入也可以用於輸出;用作輸出時,輸入暫存器可以配置為輸出信號的監測迴路。
雙向輸出通道默輸出低電平。當連線埠配置為輸入連線埠,輸出狀態為高阻態。當連線埠配置為輸出端時,輸出暫存器置1,輸出控制繼電器置為高,雙向連線埠輸出電平與參考端電平一致。當連線埠用作輸出時,系統可以配置對應通道的輸入暫存器對輸出信號進行採集,在本地或CPU單元進行處理。本地處理時,如果輸出暫存器和輸入暫存器數據經過設定時間後採集,比較結果仍然出現故障,則板卡向CPU單元傳送故障信息,進行報警。每個輸入通道經過電阻分壓、光耦隔離、RC濾波和施密特觸發器整形,由FPGA採集存入內部暫存器中。輸出通道設計為繼電器輸出模式。根據CPU單元控制指令,通過對信號進行光耦隔離和電流驅動之後,控制輸出控制繼電器觸點動作。
3模擬量通信設計分析
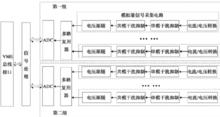 RIOM 模擬量信號輸入採集結構圖
RIOM 模擬量信號輸入採集結構圖列車電磁環境複雜,且各類感測器分布分散,距離處理器較遠,採用電壓進行模擬量信號遠距離傳輸會不可避免地產生衰減和噪聲,給信號處理帶來了很大難度。採用電流環通信,相當於對傳輸線增加了負反饋,抗干擾性能更加優越。如圖所示為RIOM模擬量信號輸入採集結構圖。
遠程輸入輸出接口設備
硬體設計
基於Modbus_RTU(Modicon公司開發的一種通信協定)的遠程輸入輸出接口的硬體電路框圖如圖所示。硬體電路主要包括處理器(單片機)、輸入輸出隔離器件和RS485收發器三個部分。
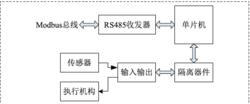 硬體電路框圖
硬體電路框圖單片機是輸入輸出接口設備的核心,其接收來自匯流排的數據命令,根據命令的形式,控制相應的連線埠輸出或將採集到的連線埠信息進行回復。單片機的電路部分又可以分為電源、晶振、看門狗三個部分,電源是數字電路工作的必須部分,通常單片機的電源是一個降壓穩壓電路,通用單片機的工作電壓一般為3.3V或5V,而普通開關電源或AC-DC模組的輸出電壓一般為12V或24V,所以需要降壓。為了保證單片機工作的穩定,需要在降壓器件的輸出側加穩壓二極體和電容,以保證電壓的穩定和降低紋波。晶振為單片機工作提供時基,晶振分為內部晶振和外部晶振兩種,外部晶振具有更好的精度和穩定性。單片機工作在工業環境中,容易受到各種干擾,會導致控制程式出現異常,看門狗電路可以將出現異常的程式及時拉回到正常狀態,防止出現事故。看門狗的原理是定時接收單片機發出的周期信號,當一定時間內沒有收到周期信號後,將單片機熱復位,讓程式重新運行,而這個過程單片機的RAM不會發生改變,保證控制功能可以繼續。
在工業控制環境中,各種干擾會衝擊傳輸線路,這就需要對單片機的連線埠進行隔離,將干擾阻擋在隔離器件之外,首先保證單片機的安全。常用的隔離器件有光耦和磁耦,光耦傳輸速率相對較低,可以在輸入輸出連線埠隔離中使用,磁耦的傳輸速率相對較高,可以在通信隔離中使用。
軟體設計
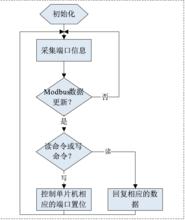 軟體流程圖
軟體流程圖軟體設計流程圖如圖所示。
初始化部分主要完成單片機的初始配置,包括晶振的設定、定時器的設定、Modbus_RTU協定棧的設定和連線埠的輸入輸出設定。採集連線埠信息部分完成對單片機輸入連線埠的電平採集,連線埠的電平狀態需要進行濾波,防止狀態出現頻繁跳動,濾波採用平均濾波法,即在一定時間內採集數次連線埠的電平,數次電平一致,則認為電平已穩定,將穩定的電平值定期存儲在Modbus_RTU暫存器中,以備Modbus主站讀取。Modbus數據處理部分採用中斷的形式,當匯流排上收到來自主站的命令時,觸發一次中斷,置中斷標識。在中斷處理程式中,首先判斷收到的命令是讀命令還是寫命令,如果是讀命令,則根據Modbus_RTU協定規則,把主站想要讀取的暫存器的值回復給主站,如果是寫命令,則改變相應的暫存器的值,進而根據內部暫存器與外部連線埠的映射關係,將相應的單片機連線埠置位。
整個軟體設計實現了主站對遠程輸入輸出接口設備的輸入口信息的採集和主站對遠程輸入輸出接口設備的輸出口的控制,主站具有匯流排控制權,可以隨時採集連線埠信息和控制連線埠輸出。
