
研究背景
 IC
ICIC 製造業是關係到國家命運的基礎性產業,是國民經濟發展中極其重要的一個支柱性產業,它幾乎存在於所有工業領域,這些領域包括:電氣工程領域、機械製造領域、航天領域和國防領域等。IC 製造業的發展甚至決定一個國家競爭實力和裝備水平,歐美、日本和韓國等國家都把 IC 製造業作為國家發展的戰略性產業,美國半導體諮詢委員會在國情咨文中稱其為“生死攸關的工業”,韓國稱其為“工業糧食”,一些已開發國家GDP 增長的 60%~70%與以積體電路為代表的電子產業有關 。
由於我國在 IC 製造業起步較晚,整體科技水平落後,加之已開發國家對我國在晶片製造核心技術、關鍵設備、IP 核和關鍵原材料等方面技術封鎖,使我國的晶片生產水平仍然與歐美及日本等已開發國家有十分大的差距,落後上述國家 3-5 代。近幾年,我國對 IC 製造業的發展也加大了力度,首先,隨著我國“中國芯”產業化進程加快,我國 IC 製造業面臨著難得的發展機遇和挑戰。其次,我國在“中國製造 2025 規劃”的高檔數控工具機和機器人領域中,重點提到了基礎製造裝備及 IC 製造業的發展規劃。此外,IC 製造業的發展還具有非常重要的戰略意義,因此,IC 製造業的研發和生產製造受到了世界各國日益重視。
IC 製造業的核心技術是光刻機設備的發展,目前世界上有三大光刻機生產商:荷蘭 ASML、日本 NIKON和 CANON 公司,掌握絕大數光刻機專利,其中,ASML 公司光刻機代表著國際最先進的技術水平,該公司最先進的 Twinscan光刻機採用雙工件台技術,其中工件台和掩模台是光刻機系統最為關鍵的子系統,兩者主要完成光刻機系統調整對焦和掃描曝光等功能,其關鍵技術涉及精密機械加工、精密測量、運動控制和驅動控制等技術。 光刻機技術發展的核心指標為晶圓尺寸、線寬和產品率,其中線寬決定了積體電路的複雜度和功能密度 。
超精密定位運動控制系統特點
(1)超精密定位運動控制系統是一個多交叉學科的研究領域,從目前來看主要包括機械、光學、電氣、控制和測量等領域,而大多數學者都將研究重點放在超精密定位平台、支撐結構和運動控制策略上。
 音圈電機
音圈電機(2)根據光刻機系統中音圈電機工況特點和功率放大器指標來看,無論採用線性功率放大器還是開關功率放大器,都難於使音圈電機功率放大器同時達到高功率、高精度和高頻寬的指標要求。
(3)音圈電機數學建模方面集中在由支撐結構引起擾動建模,包括摩擦力和推力波動建模,其擾動頻率較低,採用前饋查表和建立複雜數學模型等方法補償擾動來提高定位精度。當音圈電機在高頻下運動時,其表現出的各種非線性特性相對比較複雜,難於建立精確數學模型。
(4)在超精密定位運動控制系統中,通常以提高信號跟蹤能力、克服內外干擾、抑制系統振動和縮短定位穩定時間為控制目標,很難找到一種全面的控制策略,通常是幾種控制算法相互配合,互補不足來最終實現 。
音圈電機工作原理
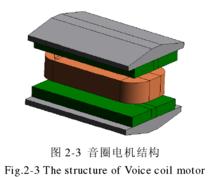 音圈電機結構
音圈電機結構音圈電機是一種特殊形式的直流直線電機,其具有高頻響、高加速度、體積小和控制方便等優點,由於這些優點,音圈電機能夠解決精度與速度和大行程之間矛盾問題。近年來,隨著超精密定位系統性能指標的提高,導致音圈電機技術迅速發展,不僅在半導體製造裝備、高檔數控工具機和光學電子顯微鏡等超精密定位系統中得到廣泛套用,還在醫療、振動平台和主動減振系統等高激勵運動系統中運用 。
 音圈電機分類
音圈電機分類音圈電機(voice coil motor,VCM)是一種基於安培力原理設計的直線電機,如圖所示,主要由永磁體、線圈和軛板 3 部分組成。其原理為當通電線圈在氣隙磁場中運動時,根據洛倫茲力原理,則會產生推力驅動線圈在氣隙內沿軸向運動,隨著線圈中電流方向和數值的變化,線圈做往返直線運動。除了和其他直線電機一樣可消除傳動環節中存在間隙等不足外,在理論上音圈電機具有高回響、高加速度、結構簡單和力特性好等優點,廣泛套用於高頻激勵、高回響和高精度定位運動控制系統中。
 音圈電機
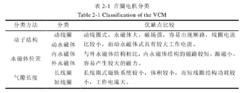
音圈電機根據音圈電機永磁體所處的位置不同,分為內永磁體式和外永磁體式;根據音圈氣隙長度,分為長線圈和短線圈結構;根據動子結構,分為動線圈式和動永磁體式,各個種類音圈電機優缺點對比如表所示。
通過對表中各個性能比較可以得出,為了滿足音圈電機高加速度、快速回響和高頻響的運動特性,在運動部件質量一定的條件下,應該選擇內永磁體式、動永磁體式和短線圈式結構的音圈電機,此種類型的音圈電機具有功耗小、工作電流大和推力大等優點。
音圈電機高精度軌跡跟蹤控制策略研究
在掃描運動中,音圈電機按照已規劃運動指令運動,屬於高精度軌跡跟蹤運動控制(Trajectory tracking control),其運動控制目標:音圈電機始終跟蹤目標軌跡運動,並且在運動過程中儘量保證運動軌跡的跟蹤誤差最小,與此同時,為了減小運動過程中高加減速對機械系統的衝擊,指令軌跡規劃也是實現高精度軌跡跟蹤技術的關鍵技術。對於高精度軌跡跟蹤運動控制來說,負載擾動、電阻電感變化、電機非線性以及機械振動等因素都可能使伺服系統性能變壞,因此,對控制系統的魯棒性提出了更高的要求,採用自抗擾控制和5階S型曲線相結合的控制方式,實現高精度軌跡跟蹤控制 。
高精度運動軌跡規劃
在現代超精密數控加工系統、機器人系統和光刻機系統中,通常其控制系統都以實現高加速度和高速度運動為目標。然而,頻繁高加速度突變會引起系統振盪,對機械系統產生衝擊,無法使控制對象快速和精確定位。
指令軌跡規劃能夠使軌跡加速度曲線變的平滑連續,可以減小高加速對機械系統的衝擊,其中S型軌跡規劃是一種常用的指令軌跡規劃方法,廣泛套用在實際工程中,其設計準則:
(1)根據電機運動工況需求和一些約束條件,其約束條件包括最優調節時間、最小功耗和最小加速度等;
(2)在滿足以上約束條件的前提下,計算出各自的限制值和時間切換點;
(3)最後,依次積分求得加速度、速度和位移隨時間變化的曲線。
自抗擾控制策略研究
傳統PID控制算法的原理:根據控制目標與被控輸出之間的誤差、誤差微分及誤差積分的加權和來生成控制量,該控制算法至今仍在控制實踐工程中被大量採用,然而,在高精度運動控制領域,傳統PID控制器難於滿足超精密定位系統的控制目標要求。韓京清教授提出了一種自抗擾控制(Active Disturbance Rejection Control,ADRC)算法,在保持PID不依賴於數學模型基礎上,對傳統PID控制方法進行改進,包括如下幾點:
(1)根據設定值預先安排合適的過渡過程。
(2)誤差微分信號通過跟蹤微分器和狀態觀測器來提取。
(3)在非線性領域尋找更合適的P、I和D組合來改進誤差反饋規律。
(4)採用擴張狀態觀測器估計擾動總和並進行實時補償。
 超精密定位音圈電機驅動控制系統
超精密定位音圈電機驅動控制系統通過上述4方面對傳統PID控制算法的改進,ADRC控制算法具有算法簡單、魯棒性強、易於數位化和參數調節方便等優點。目前,ADRC算法已被成功套用在機器人高速高精度控制、永磁同步電機調速控制和DC-DC功率變換器控制等諸多領域。
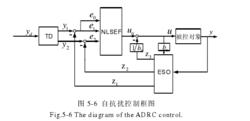
ADRC控制器主要由三部分組成:跟蹤微分器(Tracking-Differentiator,TD)、擴張狀態觀測器(Extended State Observer,ESO)和非線性狀態誤差反饋(Nonlinear State Error Feedback,NLSEF),其控制框圖如圖所示。
1)跟蹤微分器(TD)
跟蹤微分器的作用對目標值安排過渡過程,當指令信號為階躍信號時,由於被控對象慣性環節的存在,在跟蹤起始階段存在大誤差,為了加快跟蹤效果,勢必加大控制增益,從而產生較大的超調量。為了降低初始誤差,設計一個合理過渡過程,同時給出過渡過程的微分信號,使系統跟蹤事先安排好的過渡過程曲線,能夠有效地減少超調量,從而提高控制系統性能。
2)擴張狀態觀測器(ESO)
自抗擾控制器核心部分為擴張狀態觀測器,其不依賴具體數學模型,也不需要直接去測量,把控制系統中的“內擾”和“外擾”看成總擾動,利用“擴張狀態觀測器”估計出實時擾動量並加以補償。
3)非線性狀態誤差反饋(NLSEF)
傳統PID控制形式為P、I和D的線性組合,這種線性組合併不是最佳組合,韓京清教授提出了一種非線性PID控制器,充分利用非線性函式特性,實現“小誤差大增益,大誤差小增益” 。
音圈電機高精度點對點定位控制策略
在定位運動中,音圈電機根據偏轉角計算位置誤差進行定位補償,其運動方式屬於高精度點對點定位運動控制(Point-to-point positioning control),其運動控制目標:音圈電機實現點對點精確定位,只關注回響時間以及目標位置的定位精度,其運動伺服控制系統應具有快速回響、無超調量和魯棒性強等特點,通常快速回響和無超調量是一對相互制約的指標。
為了解決快速性和超調量的矛盾,有學者首先提出複合非線性反饋控制策略(CNF),該控制策略包括線性部分和非線性部分,線性部分通過減小系統阻尼來提高系統的回響速度,而非線性部分使電機在臨近目標點時逐漸加大系統阻尼來抑制超調量的產生。有學者將複合非線性反饋控制算法拓展至輸出反饋控制。然而,上述控制策略只適用於定常參考指令跟蹤,不能滿足時變參考跟蹤控制,為此,輔助信號發生器被引入到CNF中,解決時變輸入跟蹤控制。針對多變數飽和線性系統時變參考輸入跟蹤問題,一種推廣的組合非線性反饋控制被提出。
針對複合非線性反饋控制對參數擾動和負載擾動自適應差的問題,模型自適應補償算法加入到該算法中,有效提高系統魯棒性 。
