
基本介紹
 被動行走模型的發展
被動行走模型的發展被動動力行走(Passive Dynamic Walking)指的是機構只依賴自然力及本身的結構而實現的雙足或多足行走。這裡的自然力指的是重力、足與地面的摩擦力及碰撞力,而機構本身可以包含一些如彈簧阻尼之類的被動元件,但不含可將非機械能轉換為機械能的部件如電機等。顯然,由於足與地面的碰撞和摩擦導致的能量損失,純被動機構不能在平地上持續行走,但依靠重力提供能量補充,它可以在斜面上實現穩定持續的下坡行走。給純被動行走機器加以簡單的驅動,用很少的能量代替在下坡時由重力提供的能量,就可以實現其在平地的穩定行走,這樣的行走稱為基於被動原理的行走。
概念
被動動態行走是研究雙足(兩條腿)步行系統的一種方法,這個系統包括人類或其他雙足動物,或你想製作或控制的雙足步行機器人。被動動態行走是看待雙足步行的一種方式。與其把它作為一個持續不斷的努力保持平衡,不如把雙足行走看做一個在足部接觸變化的間歇干擾下的持續的被動跌倒,我們可以對它由一個更好的理解。然後可以將一串穩定持續的步子看做周期運動進行分析。
 被動行走
被動行走被動動態行走的方法最早由McGeer提出,引發了各種關於人類行走的見解,並已產生了一些自然和有效的步行機。
被動行走可以被視為混合系統產生的一種物理現象,其中包括腿擺動動作的連續動態和離散的腿交換事件。分析混合系統得到步態生成和穩定性。
被動步行可以展示一個穩定的極限環。當狀態保持穩定極限環,步行系統是穩定的。
McGeer首先由離散時間系統研究被動行走。他證明了雅可比矩陣不動點的穩定性,雅可比矩陣是由線性化離散時間狀態方程(稱為“步到步方程”)得到。
由Wisse提出的研究被動行走的幾點建議如下:
弧形腿。不要使用點型足,因為吸引盆非常小。一個半徑約腿長1/3的弧形腳相對更好。
弧形腿可以牢固地附在小腿上,所以沒有踝關節。如果你不喜歡這個非人類的特徵,弧腳同樣可以改為裝在腳踝上內附彈簧的扁平足。
前後質量平衡。對每一個新的坡度,可能會需要重新調整前後質量平衡。有兩個影響需要同時考慮。首先,前後質量平衡影響每一步加速度和減速度的量。當機器人有一種減慢或向後倒的趨勢,將質量前移。如果你移過度了,該機器人將加快並向前跌倒。在這裡質量平衡是和腳的位置有很大的關聯。如果腳被移前(如大多數膝蓋被動步行者),質量也需要一個向前偏移。第二,一條腿內的質量平衡影響被動擺動。在擺動腿要關於其垂直平衡左右對稱。所以,如果質量靠後,然後腿擺動會比開始要遠。這是好事,因為它降低了前倒的幾率。正如McGeer已經指出那樣:髖關節摩擦可以通過後移腿部質量補償。
偽二維。大多數研究人員從二維被動步行開始,用四腿對稱的結構。該機器人是不是真正的二維(在我們的物質世界中沒有什麼東西是二維的),所以重要的要將近似做得儘可能好。需要良好的固定的工作,因為那是一個很好地面。另外一個訣竅在於連線膝蓋行走者的弓形墊。
良好的外形工程非常重要。彈跳,撓性,摩擦,關節滑動(所有這一切都不能準確地進行建模)應減少到最低限度。 增大質量。一般來說,腿質量應增大;沉重的髖關節是好的,沉重的腳是不好的。對有膝蓋的模型也是一樣;小腿應輕巧,其質心應接近膝關節。
對稱的步態。腿應是一樣的,使機器人對稱。如果結果仍然是一個非對稱的步態(一個長步子,然後一個短步子),那么這意味著步行周期是剛剛穩定。對於最簡單的走路模型,這發生在陡峭的山坡上。嘗試調整等參數使不對稱性消失。
髖關節極限點。髖關節有極限位置有利於穩定性。
淵源
上世紀八十年代,加拿人學者T.McGeer提出了被動動力學理論,並由此有了“機器人被動行走”的概念。T.McGeer設訓了一類簡單的雙足無動力行走機器人,其行走是在小傾角斜面上由上而下靠自身重力驅動實現的。T.McGeer對其被動機器人模型行走動態和穩定性進行了研究,由此開啟了雙足行走機器人研究的有一領域——久驅動機器人。無動力雙足機器人動力特性的研究有助於揭示人類雙足行走的記憶體機理,解釋人類行走穩定性、魯棒性、高效率的原因。
傳統的仿人雙足機器人大多採用跟蹤預設關節軌跡的控制方法,雖然可實現類人行走和跑步,但控制機理與人類不同,且能耗性很高。例如,本田公司的ASIMO仿人機器人的行走能耗就是人類行走能耗的數十倍以上.被動行走為實現高效自然行走提供了一個可能的解決途徑。
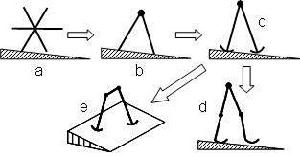
其實,要做雙足機器人最基本的工作就是實現他的邁步。邁步要怎樣做呢?抬腿加邁腿就可以前進了。咱們都知道,東西斜著拿,手漸漸放鬆會怎樣?會旋轉有木有?咱們就利用這個現象讓機器人邁腿,(原理是當腳的在平穩狀態時軸點與重心不平衡當腳抬起時就會邁動。)至於抬腿的實現,其實咱們不讓機器人抬腿,讓每隻腳下的地面交替變低達到的效果是一樣的,其實就是在斜面上下坡行走就可以了。
我們用“探索者”成功實現了一個被動行走機器人,這個機器人模型個頭雖小,但是表現相當不錯。我們給它取個名字叫walker。下面開始機器人的製作工作吧!
