
定義
航道跟隨誤差是在微波著陸系統中,引導信號誤差的一種。它能引起航空器偏離預定航道線或下滑道。這種誤差分量的頻率範圍方位為 0.5 弧度/秒或更小、仰角為 1.5 弧度/秒或更小。
背景
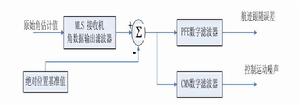
微波著陸系統(MLS)是當今世界解決各類軍民用飛機在複雜氣象條件下安全著陸的重要技術裝備之一。統計表明,著陸系統的引導誤差是飛機安全著陸的關鍵性因素,為此,國際民航組織(ICAO)在1980年公布了微波著陸系統的精度測試標準。該精度標準是按飛機實際的著陸動態過程將角誤差分解為航道跟隨誤差(PFE)、航道跟隨噪聲(PFN)和控制運動噪聲(CMN)分量。另外,ICAO規定該系統誤差是在角數據輸出濾波器之後分別用PFE濾波器和CMN濾波器進行測量的。
把 MLS 角誤差在頻域分解成PFE、PFN 和CMN 三個分量,是考察飛機著陸的實際動態過程後作的結論,它得到了廣泛的支持並成為一個標準。在方位上小於等於 0.5rad/s,在仰角上小於等於1.5rad/s 的角誤差成分會導致飛機偏離預定航向道(或下滑道),這種稱之為 PFE 的分量體現了預定航向道(或下滑道)與飛機跟隨角引導信號的實際航道之間的偏差。
測量方法
 角誤差測量法
角誤差測量法PFE和CMN誤差具體測量方法為:指揮駕駛員按預定航向飛行,同時記錄下機載設備從角數據輸出濾波器輸 出的制導指示數據,並將其與雷射跟蹤系統或精密雷達跟蹤系統測得的飛機絕對基準位置相減,之後分別用PFE濾波器和CMN濾波器輸出各自的誤差值。
誤差要求
 航道跟隨誤差
航道跟隨誤差進場基準點的方位引導誤差要求: ;
 航道跟隨誤差
航道跟隨誤差進場基準點的仰角引導誤差要求: ;
 航道跟隨誤差
航道跟隨誤差沿跑道中心延長線上,距跑道入口37km處:
 航道跟隨誤差
航道跟隨誤差40度方位距跑道入口37km處:
 航道跟隨誤差
航道跟隨誤差沿跑道中心延長線上,距跑道入口9km處:
 航道跟隨誤差
航道跟隨誤差40度方位距跑道入口9km處:
