智慧型交通系統的目的是高效率地使用道路和車輛。在同樣的道路上提高交通流量,就要提高車速和減小車間距。這些指標提高到一定程度時,人的操縱能力不能滿足安全性要求。因此降低駕駛的勞動強度和複雜性也是汽車技術追求的目標。控制目標由以往的提高機械性能發展為輔助或部分取代或全部取代人的操縱,達到減少由於人的局限性造成的事故,減輕駕駛強度提高交通效率,降低污染的目標。
縱向控制
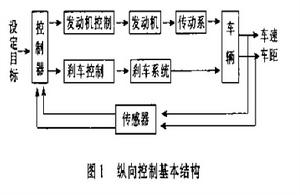
控制是在行車速度方向上的控制,即車速以及本車與前後車或障礙物距離的自動控制巡航控制就是一種縱向控制。這類控制問題可歸結為對發動機輸出和剎車的控制。各種發動機模型、汽車運行模型和剎車過程模型與不同的控制器算法結合,構成了各種各樣的縱向控制模式,典型結構如圖1。
 自動車輛控制
自動車輛控制基於傳統控制的方法,如PID控制,一般是建立發動機和汽車運動過程的近似線形模型,在此基礎上設計控制器。這種方法實現的控制,由於對模型依賴性大及模型誤差較大,所以精度差、適應性差基於智慧型控制的方法,如模糊控制、神經網路控制,在縱向控制中也得到廣泛研究和套用,並取得了較好的效果,被認為是最有效的方法。從目前的論文和研究的項目看,尋求簡單而準確的發動機、剎車過程和汽車運動模型,以及對隨機擾動有魯棒性和對汽車本身性能變化有適應性的控制器仍是研究的主要內容。
目前套用的系統如巡航控制,防碰撞控制,都是自主系統,即由車上感測器獲取控制所需信息。在智慧型交通環境下,腳踏車可以通過通訊信息系統獲得更多的信息用於控制。對於縱向控制,可利用本車及周邊車輛位置、當前及前方道路情況,前車操縱狀態等信息實現預測控制.達到提高速度減小車間距的同時保證安全,即達到安全、高效的目的。
橫向控制
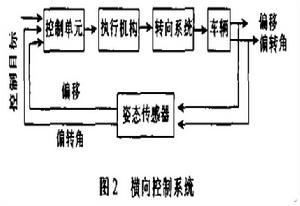
橫向控制指垂直於運動方向上的控制.對於汽車也就是轉向控制。目標是控制汽車自動保持期望的行車路線,並在不同的車速、載荷、風阻、路況下有很好的乘坐舒適性。橫向控制有兩種基本設計方法,一種是基於駕駛員模擬的方法·另一種是給予汽車橫向運動力學模型的控制方法。基於駕駛員模擬的方法,一種策略是使用較簡單的運動力學模型和駕駛員操縱規則設計控制器:另一策略是用駕駛員操縱過程的數據訓練控制器獲取控制算法ul。基於運動力學模型的方法要建立較精確的汽車橫向運動模型。典型模型是所謂單軌模型,或稱為腳踏車模型,也就是認為汽車左右兩側特性相同。橫向控制系統基本結構如圖2。控制目標一般是車中心與路中心線間的偏移量,同時受舒適性等指標約束。
 自動車輛控制
自動車輛控制自動駕駛
當實現了縱向和橫向自動控制,就可以按給定目標和約束自動控制車運行。所以,從車本身來說.自動駕駛就是綜合縱向和橫向控制。但要真正實現點到點的自動駕駛運行,車輛控制系統必須獲取道路和周邊交通情況的詳細動態信息和具有高度智慧型的控制性能。完善的交通信息系統和高性能、高可靠性的車上感測器及智慧型控制系統是實現自動駕駛的重要前提。由於點到點自動駕駛的難度,人們提出首先實現自動駕駛路段的概念,即在路況簡明的高速公路段開闢可自動駕駛路段,進入這種路段可以啟動自動駕駛,出這個路段時再轉入手操縱。
車列控制
為了提高交通效率.智慧型交通系統還提出了車輛自動編隊行使的方式(Platoon),也就是把一組相鄰的高度自動化的車編為一個車列。這是一個相互距離很近、高速行駛、動態組編的車隊。車間靠信息的溝通保持協調行駛如果說火車列車是由機械連線的車輛系統,那么Platoon是行駛在公路上的,由信息連線的,可動態編組的車輛構成的列車。依靠感測器和信息通訊系統及先進的車上控制系統保持車間相對距離在安全範圍內。其運行狀態是在交通系統範圍內最佳化,既通過交通控制中心動態編組調度,使各車列一路綠燈高速安全行駛。
Platoon有兩種組織形式。一種是無車間通訊,依靠車上感測器獲取前後車運行狀態以及道路周邊交通情況由於無法預知前車及頭車操縱和運行狀態,要求車間安全距離長,車問相對速度和相對距離穩定性差。另一種是有車間通訊、由於各車可預知頭車及前後車的操縱及運行狀態,使各車之間控制協調.車間的安全距離可以更小,相對速度和相對距離穩定性好。
在Platoon控制中,除了腳踏車的縱向和橫向控制外,還要考慮保持隊形穩定的控制,即保持相對距離。為了研究其穩定性,往往把Platoon作為一個整體建模分析,以確定適當的控制算法和參數。一種典型的模型是質量一彈簧一阻尼系統’模型。其基本思想是,把腳踏車看作一個質量、車間的相互作用由虛擬彈簧和虛擬阻尼來模擬,為保持隊形的控制算法和控制參數反映彈簧剛度和阻尼係數;把行進的Platoon看作由彈簧和阻尼連線的系統,求出當頭車運行狀態變化時,使隊形最穩定的彈簧剛度和阻尼係數.由此確定車的最佳控制參數。
