
簡介
作者:貝爾信 DJ 凱視力成
自動跟蹤是連續跟蹤並測量運動目標軌跡參數的系統。自動跟蹤的目標是以一定速度和加速度運動的車輛、艦船、飛機、飛彈和人造衛星等。自動跟蹤可提供運動目標的空間定位、姿態、結構行為和性能,是運動目標的多功能和高精度的跟蹤和測量手段,自動跟蹤由位置感測器、信號處理系統、伺服系統和跟蹤架等部分組成。
光電跟蹤系統以高於微波頻率的光波為信息的載體,特強的抗電磁干擾能力,獨有的夜間觀察功能和良好的戰場適應性等,在低可觀測性目標的探測、高解析度的目標識別、精確制導、火控瞄準、飛行輔助和信息對抗等軍事套用領域具有巨大的潛力。光電跟瞄系統不僅是常規電子裝備的重要補充手段,而且因其獨特的性能,在夜視、高解析度成像、高精度跟蹤和制導、抗電子干擾、抗反輻射飛彈、抗低空突防和反隱身等方面都能夠獨當一面。小型光電跟瞄系統一般由白光電視、紅外探測器、雷射測距機、伺服系統、監控單元和光電平台等組成。它能探測並跟蹤近距離、低空(或超低空)飛行的無人偵察機、巡航飛彈、高速戰鬥機、武裝直升機等,為火控系統等後續設備提供精確的目標諸元,使防空高炮等武器能夠有效打擊目標。另外,由於其體積小、重量輕、機動性好,所以布置靈活、便於組網、隱蔽性好,同時光電跟瞄系統本身抗干擾能力強,尤其能抗強電子干擾等特點,使其能有效彌補現有雷達的不足,在軍事上具有廣闊的套用前景.除了武器以外,光電跟瞄系統在雷射通信、天文觀測、航空攝影、靶場測試等領域也都取得了日益廣泛的套用。在雷射通信方面,利用雷射束傳遞信息,其有效頻寬在理論上可以比平常的通信信道容量增加105倍。由於用雷射束通信的信息不易被截獲,通信系統不易被人為干擾等非常具有誘惑力的特點,同時由於大容量、機動性和保密通信的需求,吸引人們研究和開發雷射通信。然而,能否解決這種通信系統雙端的自動跟瞄問題,幾乎成為其能否付諸實用的關鍵。雖然在這些領域中對光電跟瞄系統要求的側重點各不相同,但總的趨勢都是向高精度、高速度、強適應性發展。要達到高精度,除了要有高性能的光電感測元件之外,快速、靈活而精度高的伺服系統也是關鍵。而常規的跟瞄伺服系統無論快速性還是精度和抗干擾性都很難滿足要求,所以對光電跟瞄裝置的結構和控制方案的研究已成為必然。
電視自動跟蹤系統採用可見光電視攝像機或者紅外攝像機作為探測器,電視攝像機對視場內目標像進行光柵掃描,把光信號轉換成電信號。電視自動跟蹤按目標跟蹤點的不同分邊緣跟蹤、矩心跟蹤和相關跟蹤。以最先掃描到的目標像位置作為目標跟蹤點的跟蹤稱為邊緣跟蹤;全掃描目標像後經過計算,算出目標像的矩心作為目標跟蹤點,稱為矩心跟蹤;算出幀間目標像的相關函式,選取相關係數最大點或者按照幀間目標像的匹配算法算出匹配函式最大點作為目標跟蹤點,稱為相關跟蹤。
一個完整的光電跟蹤系統由圖像感測器(如 CCD、或紅外攝像機等)、安放攝像機的兩軸伺服平台以及一個跟蹤器。跟蹤器通過圖像感測器的圖像來控制平台的位置。
典型自動跟蹤模型
 自動視頻跟蹤模型
自動視頻跟蹤模型套用場景
機載光電觀瞄系統
車載光電跟蹤系統
艦船光電跟蹤系統
火箭發射、飛機起降自動視頻跟蹤系統
邊防監視跟蹤系統
其它套用場合的自動視頻跟蹤系統
跟蹤算法
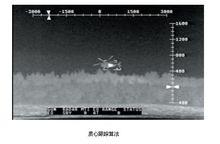
質心跟蹤算法:這種跟蹤方式用於跟蹤有界目標,且目標與環境相比有明顯不同灰度等級,如空中飛機等。目標完全包含在鏡頭視場範圍內。
 自動跟蹤
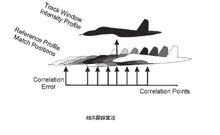
自動跟蹤相關跟蹤算法:相關可用來跟蹤多種類型的目標,當跟蹤目標無邊界且動態不是很強時這種方式非常有效。典型套用於:目標在近距離的範圍,且目標擴展到鏡頭視場範圍外,如航行在大海中的一艘船。
 自動跟蹤
自動跟蹤相位相關算法:相位相關算法是非常通用的算法,既可以用來跟蹤無界目標也可以用來跟蹤有界目標。在複雜環境下(如地面的汽車)能給出一個好的效果。
 自動跟蹤
自動跟蹤多目標跟蹤算法:多目標跟蹤用於有界目標如飛機、地面汽車等。它們完全在跟蹤視窗內。對複雜環境裡的小目標跟蹤,本算法能給出一個較好的性能。
邊緣跟蹤算法:當跟蹤目標有一個或多個確定的邊緣而同時卻又具有不確定的邊緣,這時邊緣跟蹤是最有效的算法。典型如火箭發射,它有確定好的前邊緣,但尾邊緣由於噴氣而不定。
 自動視頻跟蹤器
自動視頻跟蹤器場景鎖定算法:該算法專門用於複雜場景的跟蹤。適合於空對地和地對地場景。這個算法跟蹤場景中的多個目標,然後依據每個點的運動,從而估計整個場景全局運動,場景中的目標和定位是自動選擇的。當存在跟蹤點移動到攝像機視場外時,新的跟蹤點能自動被標識。瞄準點初始化到場景中的某個點,跟蹤啟動,同時定位瞄準線。在這種模式下,能連續跟蹤和報告場景里的目標的位置。
 自動跟蹤
自動跟蹤組合跟蹤算法:顧名思義這種跟蹤方式是兩種具有互補特性的跟蹤算法的組合:相關類算法 + 質心類算法。它適合於目標尺寸、表面、特徵改變很大的場景。
光電跟蹤技術要點
應突破傳統的視頻目標取差器的設計理念,融合捕獲和自動跟蹤兩種模式下的平台運動控制、感測器視場和指向等諸多信息對目標運動加以預測,使得跟蹤更加可靠平穩,並具有良好的普適性。
內置多種圖像增強預處理算法:白熱、黑熱、雙極性、移動目標檢測等。
視頻捕獲:可根據目標的亮度、尺寸、外形比例、速度、運動方向等自動獲取目標。
視頻跟蹤:內置多種跟蹤算法且支持多目標檢測和多目標跟蹤;目標短暫丟失智慧型鎖定和重捕獲算法。
可程式兩軸平台驅動控制(PID);支持速率和位置控制。
算法的FPGA實現,使得模組具有極低的延遲:輸出偏差或平台運動參數延遲小於1場時間(PAL一場時間是20ms、NTSC為16.7ms),可同步輸出,也可即時輸出。
圖像處理功能:基於場景鎖定的極低延遲實時電子穩像。
OSD功能,支持標準的和用戶自定義的字元和符號,如:跟蹤視窗、符號標記、瞄準線、狀態等等。
圖像平移、縮放和旋轉功能,以糾正感測器安裝位置對視頻的影響。
支持固定視場、可切換視場、連續變化(ZOOM)視場的攝像機,從而實現在自動跟蹤狀態下可以進行視場改變或切換操作,並保持跟蹤不會因此而中斷。
結構緊湊、功耗低。
跟蹤技術
自動跟蹤信息處理由簡單處理向圖像信息處理方向發展,由點跟蹤向點跟蹤和圖像處理技術相結合方向發展,充分利用目標圖像信息,提高抗干擾性能。電視跟蹤器產生多個視窗,能同時跟蹤視場內數字目標。多目標跟蹤採用先求出各個目標中心,然後求出多個目標中心形成多邊形的中心進行跟蹤,也能由人工指定需要的某個目標進行自動跟蹤。
