
概述
目標識別最早是通過接收可聽信號來完成,經訓練的操作者將根據雷達照射目標所產生的聲音而分類目標。雖然訓練有素的操作員很成功,但自動化的方法也已開發,並繼續向更高的分類精度和速度發展。
自動目標識別可用於識別人造物體,例如地面、飛行器以及生物目標(例如動物、人類和植物雜波)。這對於識別和濾除戰場上的大群鳥類在都卜勒天氣雷達上引起的干擾等是有用的。
軍事套用則包括簡單的識別系統,例如IFF轉發器,以及無人航空載具和巡航飛彈等其他套用。在民用領域使用自動目標識別也有著越來越多的嘗試。例如使用自動目標識別確保邊界安全,使用安全系統識別捷運軌道等上的物體或人體等 。
歷史
目標識別自有雷達以來就已存在。雷達操作員通過接收到的反射信號產生的音頻識別敵方的轟炸機和戰鬥機。
向操作員播放基帶信號來完成目標識別已存在多年。通過收聽信號,經過訓練的雷達操作員可以識別被照射目標的各種信息,諸如載具的類型、目標的大小,乃至潛在區分生物目標。但這種方法也有許多限制,操作員必須被訓練每個目標的特徵,如果目標以高速行進則可能無法聽到,並且人類決策可能增加錯誤判斷的機率。但可聽信號表示為自動歸類目標提供了基礎。已經開發的數種方法已使用在其他領域(例如語音識別)。
相關概念
微都卜勒效應
雷達通過定時發射信號並根據該信號所照射目標的反射所花費的時間確定與物體的距離。在該物體非靜止時,它引起都卜勒效應的頻率偏移。除了整個物體的平移運動外,物體的振動或旋轉也引起頻率的額外偏移。當這種情況發生時,都卜勒頻移信號將被調製。這種引起信號調製的額外都卜勒效應稱為微都卜勒效應。這種調製可以具有特定模式或特徵,從而能為自動目標識別開發算法。微都卜勒效應將隨時間推移而改變,這取決於目標的運動、引發時間和頻率變化的信號。
時頻分析
該信號的傅立葉變換分析是不夠的,因為傅立葉變換不能解釋時變分量。獲取頻率和時間函式的最簡單方法是使用短時距傅立葉變換(STFT)。但是,諸如加伯轉換和維格納準機率分布(WVD)等更魯棒的方法可以用於提供頻率和時域的同時表示。然而,所有這些方法都要折衷考慮頻率解析度與時間解析度。
檢測
一旦已獲取光譜信息,它可以與包含系統將識別目標的有關信息的現有資料庫進行比較,並且據此做出有關被照射目標為何的決定。這通過對接收到的信號建模,然後使用統計估計方法確定庫中的哪個目標最適合使用接收到的信號構建的模型來完成決定,統計估計諸如最大似然估計(ML)、多數決原則(MV)和最大後驗機率(MAP)。
方法
提取特徵
在語音識別中使用音頻特徵、基於音頻啟發係數構建自動識別目標的系統已被完成。這些係數包括:
線性預測編碼(Linear predictive coding,LPC)係數;
倒頻譜(Cepstral linear predictive coding,LPCC)係數;
梅爾倒頻譜(Mel-frequency cepstral coefficients,MFCC)。
處理基帶信號可以獲取這些係數,然後用統計處理方法決定資料庫中的哪個目標與所獲取的係數最相近。使用哪些特徵和決策方案取決於系統和套用。
用於分類目標的特徵不限於語音啟發的係數。可以使用廣泛的特徵和檢測算法來完成自動目標識別。
檢測算法
 自動目標識別
自動目標識別為完成自動化檢測的目標,需要創建一個訓練資料庫。這通常使用在目標已知時收集的實驗數據完成,然後存儲供ATR算法使用。
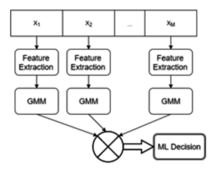
流程圖展示了檢測算法的示例。該方法使用M個數據塊,從每個(即LPC係數,MFCC)提取期望的特徵,然後使用高斯混合模型(GMM)對它們建模。在使用收集的數據獲得模型之後,針對包含在訓練資料庫中的每個目標形成條件機率。在該示例中,存在M個數據塊。這將導致資料庫中每個目標的M個機率的集合。這些機率用於使用一個最大似然估計確定目標 。
