
概述
2010年7月12日,世界首台脊柱微創手術機器人在重慶新橋醫院進行前期的臨床試驗。脊柱微創手術機器人系統可通過機械的精準定位提高手術的精準性,降低手術風險和減少術後併發症的發
 脊柱微創機器人
脊柱微創機器人生率,同時還能降低對醫生的放射損害,對於脊柱微創技術在臨床的進一步推廣運用具有十分重要的意義,填補了國內外相關領域空白。該系統由第三軍醫大學新橋醫院與中科院瀋陽自動化研究所聯合研發,具有完全自主智慧財產權。
結構組成
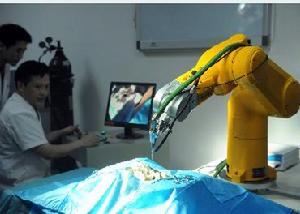
這個“機器人”由機械臂和控制台兩大系統組成。主體機械臂形如一隻粗壯的人體手臂,包括“胳膊、前臂、手掌”三大部位。連線三大部位的各關節均可全方位轉動,可輕鬆到達脊柱椎體和骨骼相關部位任何位置;“手掌”部分可根據手術需要安裝骨鑽、骨刀、椎弓根螺釘等多種手術器械,並附帶有攝像頭和照明光源,實時傳輸手術界面至控制台;控制台包含監視器、操作面板等部分,醫生通過在控制台上的操控指揮機械臂完成相關手術動作。 在研究人員的操控下,“機器人”不到一分鐘就輕鬆完成了對一塊腰椎模型的兩次定位、瞄準、鑽孔操作,而且在兩次對同一部位的重複操作中,幾乎毫髮不差、十分精準。
優點
 脊柱微創機器人
脊柱微創機器人而脊柱微創手術機器人的誕生,可以通過機械的精準定位和替代醫生在放射線下的手術操作,提高手術的精準性,降低手術風險和減少術後併發症的發生率,同時還能降低對醫生的放射損害,對於脊柱微創技術在臨床的進一步推廣運用具有重要的意義。
