羅經
正文
提供方向基準的儀器。船舶用以確定航向和觀測物標方位。羅經有磁羅經和陀螺羅經兩種,一般海船都同時裝備有磁羅經和陀螺羅經。前者簡單可靠,後者使用方便、準確。磁羅經 利用自由支持的磁針在地磁作用下穩定指北的特性而製成的羅經。磁羅經由中國的司南、指南針逐步發展而成。
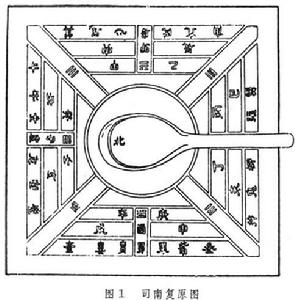
司南為天然磁石製成的勺形物,投轉於光滑的地盤上,停止時勺柄指南。地盤四周刻有八卦和天干地支名稱,用於表示方位(圖1)。
 已知關於司南的最早記述見於公元前 3世紀戰國末期的《韓非子·有度》。宋朝初期出現了人工磁化的指南針,有水浮、絲懸、針頂等方法,近代磁羅經和地磁測量儀器仍沿用這些基本結構。北宋沈括在《夢溪筆談》(1063年)中描述了用磁石磨針鋒製作指南針的方法,並記載了磁差的存在。
已知關於司南的最早記述見於公元前 3世紀戰國末期的《韓非子·有度》。宋朝初期出現了人工磁化的指南針,有水浮、絲懸、針頂等方法,近代磁羅經和地磁測量儀器仍沿用這些基本結構。北宋沈括在《夢溪筆談》(1063年)中描述了用磁石磨針鋒製作指南針的方法,並記載了磁差的存在。 指南針是初級階段的磁羅經,是中國古代四大發明之一。唐宋時期中國海外貿易非常發達,大型商船遠航到波斯灣、紅海等地,造船和航海技術均居世界前列。指南針套用於航海的最早記載見於北宋朱彧的《萍州可談》(1119年),書中說:“舟師識地理,夜則觀星,晝則觀日,陰晦觀指南針。”用於航海的指南針又稱羅盤。明代銅製的水羅盤用八乾、十二支、四維卦位名稱標出二十四個方位(圖2)。
 通常認為羅盤是由中國傳入阿拉伯,再傳入歐洲,但有爭論。
通常認為羅盤是由中國傳入阿拉伯,再傳入歐洲,但有爭論。 相傳14世紀初南義大利阿瑪爾菲人F.喬亞首先把紙羅經卡(即方向刻度盤)和磁針連線在一起轉動。這是磁羅經發展過程中的一次飛躍。從此船舶變向就不必再用手轉動羅盤了。16世紀義大利人卡爾登製成平衡環,使磁羅經在船舶搖晃中也能保持水平。18世紀初英國人E.哈利製成第一張世界等磁差曲線圖。
鐵船出現後,磁羅經產生了自差。在此之前,關於自差現象的記述已見於明末清初方以智的《物理小識》,書中說到鐵對磁針的干擾和海船不用鐵釘的原因:“海鹹爛鐵,且妨磁也。”19世紀上半葉英國人M.弗林德斯和G.B.艾里先後提出消除自差的方法,法國泊松對自差的數學理論作出了貢獻。19世紀70年代英國物理學家W.湯姆森製成穩定性好的乾羅經安裝於有類似現代自差校正器的羅經櫃中,曾被英海軍作為標準裝備。20世紀初性能更穩定、軸針摩擦更小的液體羅經製成,現在已為大部分船舶所使用。
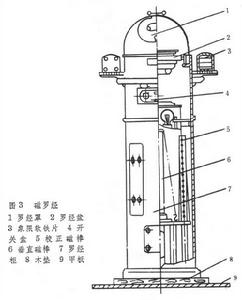
結構 磁羅經(圖3)主要由羅經櫃和羅經盆(圖4)兩部分組成。帶有磁針的羅經卡(圖5)安裝在羅經盆內。磁羅經按結構可分為乾羅經和液體羅經兩種;按用途可分為標準羅經、操舵羅經、應急羅經、艇用羅經等。現代船舶多在駕駛台頂的露天甲板上裝一能將羅經卡讀數投射到駕駛室內的標準羅經,可兼作操舵羅經。這種羅經有反射式和投影式兩種,它們的基本結構同普通羅經相似,僅多一套光學投射系統。
 羅經
羅經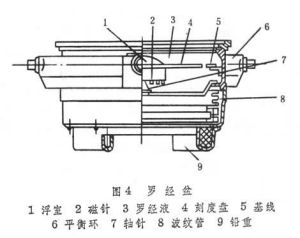 羅經
羅經 羅經
羅經陀螺羅經 又稱電羅經,是利用陀螺儀的兩個基本特性即定軸性和進動性,結合地球自轉矢量和重力矢量,藉助控制設備和阻尼設備而製成的提供真北基準的一種指向儀器。陀螺羅經是根據法國學者L.傅科1852年提出的利用陀螺儀作為指向儀器的原理而製造的。德國人安許茨於1908年,美國人E.A.斯佩里於1911年,英國人S.G.布朗於1916年分別製成以他們的姓氏命名的 3種不同的陀螺羅經,布朗羅經以後又發展為阿馬-布朗羅經。現在這3種羅經都各自形成產品系列。
陀螺羅經通常由主羅經和附屬儀器兩部分組成。附屬儀器包括電源變換器、控制箱或操縱箱和分羅經等,是確保主羅經正常工作的必需設備。為了減少陀螺羅經的部件數,電源變換器可與控制箱組裝,也可與主羅經組裝成一體。主羅經一般可帶8~20個分羅經,用以復示主羅經的航向。現代陀螺羅經向著尺寸小、重量輕、使用壽命長、維修方便、操作簡便並能適用於大、中、小型船舶的趨勢發展。例如以逆變器代替變流機,以固態元件代替電子管,以無接觸式傳送器代替接觸式傳送器等。新型陀螺羅經的靈敏部分一般都製成密封球形,並用特製的液體支承以提高其精度和可靠性。
種類 陀螺羅經按照對陀螺施加作用力矩的方式可分為機械擺式和電磁控制式兩類。
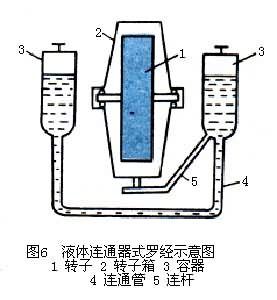
①機械擺式陀螺羅經:按產生擺性力矩的方式可分為兩種。一種是用彈性支承的單轉子上重式水銀器羅經,或稱液體連通器式羅經(圖6),如斯佩里型陀螺羅經;另一種是將陀螺儀重心置於支承中心之下,稱為下重式羅經(圖7),如安許茨型用液浮支承的雙轉子下重式羅經。
 羅經
羅經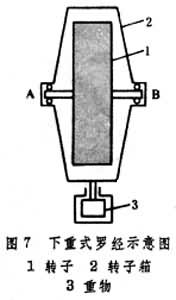 羅經
羅經液體連通器式羅經的靈敏部分由陀螺馬達和托架組成,採用鋼絲懸吊,利用水銀器的負擺效應產生控制力矩。下重式羅經的靈敏部分系一密封陀螺球,球內裝有兩個參數相同的陀螺馬達、燈形支架和阻尼器等構件(圖8)。
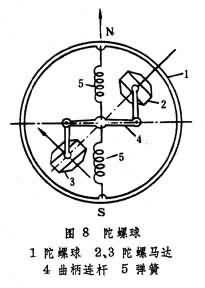 兩個陀螺馬達垂直地支承在燈形支架上,用曲柄連桿和彈簧互相連線,並分別與陀螺球主軸南北線成45°夾角。藉助這種裝置,兩個陀螺馬達只能同時繞其垂直軸作相反方向、相同角度的轉動,但轉角很小。因此,它們合成動量矩矢量始終與陀螺球主軸南北線一致,類似單轉子作用,用兩個陀螺馬達可以有效地消減搖擺誤差。
兩個陀螺馬達垂直地支承在燈形支架上,用曲柄連桿和彈簧互相連線,並分別與陀螺球主軸南北線成45°夾角。藉助這種裝置,兩個陀螺馬達只能同時繞其垂直軸作相反方向、相同角度的轉動,但轉角很小。因此,它們合成動量矩矢量始終與陀螺球主軸南北線一致,類似單轉子作用,用兩個陀螺馬達可以有效地消減搖擺誤差。 ②電磁控制式陀螺羅經:在兩自由度平衡陀螺儀的結構上設定一套由電磁擺和力矩器組成的電磁控制裝置,通過電信號給陀螺施加控制力矩的陀螺羅經(圖9),簡稱電控式羅經。因電信號易於控制,故可按需要改變控制力矩的大小而實現羅經快速穩定。阿馬-布朗型羅經為典型電磁控制式羅經。中國造CLP-1型羅經是民用船舶使用的電磁控制式陀螺羅經(見彩圖)。
 羅經
羅經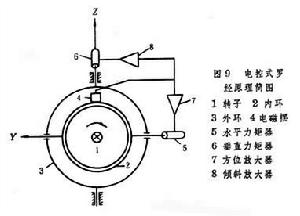 羅經
羅經誤差 陀螺羅經存在緯度誤差、速度誤差、衝擊誤差、搖擺誤差和基線誤差等。採用垂直軸阻尼法的陀螺羅經都有緯度誤差,這是一種原理誤差。速度誤差同羅經結構參數無關,而同船舶的航速、航向和所在地緯度有關。緯度誤差和速度誤差都是有規律的,可用查表法、移動基線或刻度盤法、力矩補償法等予以修正。船舶機動航行時因慣性力對陀螺羅經的影響而引起的衝擊誤差,可用切斷阻尼器並使羅經的等幅擺動周期等於84.4分鐘或切斷電磁擺的方法予以消除。陀螺羅經均有消減因船舶搖擺引起搖擺誤差的裝置,所以這種誤差一般可不予考慮。由於主羅經或分羅經的基線安裝不善而造成的基線誤差是一種固定誤差,測定後可轉動主羅經或分羅經底座使基線與船首尾線平行來校正。在平靜海面上,船舶恆速恆向航行時,修正後的陀螺羅經的誤差應不大於1°。
參考書目
上海海運學院、大連海運學院航海儀器教研室編:《電航儀器》第一篇,人民交通出版社,北京,1980。
鄔天金編著:《磁羅經自差校正》,人民交通出版社,北京,1980。
