
套用介紹
由元創興科技有限公司開發的攜帶型一級直線倒立擺採用一體化設計結構,開放的控制解決方案和模組化的實驗平台,全方位滿足本科生自動控制理論基礎課程的教學和研究需要。
產品特點
1 一體化結構:
 箱體外形圖
箱體外形圖機械本體及控制器都放置在儀器箱中,體積小巧。2 安裝方便,系統可靠:
使用時只需要打開箱蓋,插上連線線,將擺桿固定桿豎起即可以使用,不需要其他安裝工作。
3 系統可靠,信價比高:
由於選擇都是工業上產品部件,器件不裸露,所以可靠性高,適合本科學生重複使用,同時價格較低。
4 開放式平台,基礎教學為主:
採用開放式結構,以WINDOWS平台為主,適合教學與研究需要;為配合本科<自動控制理論>課程實驗需要,開設了一系列針對該課程的實驗內容。實驗內容豐富,貼切。
實驗內容
為學校提供完整實驗指導書,結合學校課程實際有選擇的開設配套實驗。
 線性二次最優控制結構圖
線性二次最優控制結構圖實驗一 運動控制基礎實驗擺桿角度測量實驗
電機位移試驗
實驗二 攜帶型直線一級倒立擺建模、仿真及實驗
倒立擺數學模型的牛頓力學推導
詳細的simulink建模過程
可控可觀性分析
階躍回響仿真
實驗三 根軌跡控制實驗
根軌跡校正方法
校正的m檔案
仿真及實時控制
 Bang_Bang起擺控制結構圖
Bang_Bang起擺控制結構圖實驗四 頻率回響控制實驗頻率回響校正方法
校正的m檔案
仿真及實時控制
實驗五 PID控制實驗
位置式PID控制方法
仿真調試及實時控制
實驗六 狀態空間極點配置控制實驗
極點配置方法
MATLAB求取、仿真及實時控制
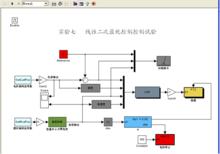
實驗七 線性二次最優控制LQR控制實驗
LQR控制算法的實現機理
LQR參數求取的MATLAB程式、仿真及實時控制
實驗八 一級倒立擺自動擺起控制實驗
Bang_Bang自擺起控制算法實現機理以及對應的實時控制
能量積累自擺起控制算法的實現機理以及對應的實時控制
