
研發歷史

從20世紀70年代開始,美國、英國、德國等已開發國家開始進行無人駕駛汽車的研究,在可行性和實用化方面都取得了突破性的進展。中國從20世紀80年代開始進行無人駕駛汽車的研究, 國防科技大學在1992年成功研製出中國第一輛真正意義上的無人駕駛汽車。
2005年,首輛城市無人駕駛汽車在 上海交通大學研製成功,
世界上最先進的無人駕駛汽車已經測試行駛近五十萬公里,其中最後八萬公里是在沒有任何人為安全乾預措施下完成的。
技術原理
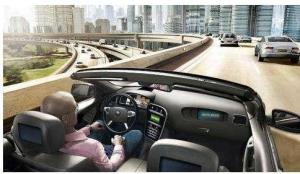
無人駕駛汽車是通過車載感測系統感知道路環境,自動規划行車路線並控制車輛到達預定目標的 智慧型汽車。

它是利用車載感測器來感知車輛周圍環境,並根據感知所獲得的道路、車輛位置和 障礙物信息,控制車輛的轉向和速度,從而使車輛能夠安全、可靠地在道路上行駛。
集 自動控制、體系結構、人工智慧、視覺計算等眾多技術於一體,是計算機科學、 模式識別和 智慧型控制技術高度發展的產物,也是衡量一個國家科研實力和工業水平的一個重要標誌,在國防和國民經濟領域具有廣闊的套用前景。
主要特點
安全穩定

安全是拉動無人駕駛車需求增長的主要因素。每年,駕駛員們的疏忽大意都會導致許多事故。既然駕駛員失誤百出,汽車製造商們當然要集中精力設計能確保汽車安全的系統。“無人”駕駛系統種類繁多,其中有些根本算不上“無人”,還有些活像是科幻小說中的東西。
防抱死制動系統其實就算無人駕駛系統。雖然防抱死制動器需要駕駛員來操作但該系統仍可作為無人駕駛系統系列的一個代表,因為防抱死制動系統的部分功能在過去需要駕駛員手動實現。不具備 防抱死系統的汽車緊急剎車時,輪胎會被鎖死,導致汽車失控側滑。駕駛沒有防抱死系統的汽車時,駕駛員要反覆踩踏 制動踏板來防止輪胎鎖死。而防抱死系統可以代替駕駛員完成這一操作——並且比手動操作效果更好。該系統可以監控輪胎情況,了解輪胎何時即將鎖死,並及時做出反應。而且反應時機比駕駛員把握得更加準確。防抱死制動系統是引領汽車工業朝無人駕駛方向發展的早期技術之一。
另一種無人駕駛系統是牽引或穩定控制系統。這些系統不太引人注目,通常只有專業駕駛員才會意識到它們發揮的作用。牽引和穩定控制系統比任何駕駛員的反應都靈敏。與防抱死制動系統不同的是,這些系統非常複雜,各系統會協調工作防止車輛失控。
當汽車即將失控側滑或翻車時,穩定和牽引控制系統可以探測到險情,並及時啟動防止事故發生。這些系統不斷讀取汽車的行駛方向、速度以及輪胎與地面的接觸狀態。當探測到汽車將要失控並有可能導致翻車時,穩定或牽引控制系統將進行干預。這些系統與駕駛員不同,它們可以對各輪胎單獨實施制動,增大或減少動力輸出,相比同時對四個輪胎進行操作,這樣做通常效果更好。當這些系統正常運行時,可以做出準確反應。相對來說,駕駛員經常會在緊急情況下操作失當,調整過度。
自動泊車

車輛損壞的原因,多半不是重大交通事故,而是在 泊車時發生的小磕小碰。泊車可能是危險性最低的駕駛操作了,但仍然會把事情搞得一團糟。雖然有些汽車製造商給車輛加裝了後視攝像頭和可以測定周圍物體距離遠近的感測器——甚至還有可以顯示汽車四周情況的 車載電腦——有的人仍然會一路磕磕碰碰地進入停車位。
由於 雷克薩斯LS 460L採用了高級泊車 導航系統,該車的駕駛員不會再有類似的煩惱。該系統通過車身周圍的感測器來將車輛導向停車位(也就是說駕駛者完全不需要手動操作)。當然,該系統還無法做到像《 星際迷航》里那樣先進。在導航開始前,駕駛者需要找到停車地點,把汽車開到該地點旁邊,並使用車載導航顯示屏告訴汽車該往哪兒走。停車位需要比車身長2米(LS的車身較長)。 自動泊車系統是無人駕駛技術的一大成就。通過該系統,車輛可以像駕駛員那樣觀察周圍環境,及時做出反應並安全地從A點行駛到B點。雖然這項技術還不能讓人完全放手,讓汽車自動載您回家,但畢竟是朝著這個方向邁出了第一步。
研發產品
紅旗
中國自主研製的無人車——由國防科技大學自主研製的紅旗HQ3無人車,2011年7月14日首次完成了從長沙到武漢286公里的高速全程無人駕駛實驗,創造了中國自主研製的無人車在複雜交通狀況下自主駕駛的新紀錄,標誌著中國無人車在複雜環境識別、智慧型行為決策和控制等方面實現了新的技術突破,達到世界先進水平。
紅旗HQ3無人車由國防科技大學自主研製,2011年7月中旬它從京珠高速公路長沙楊梓沖收費站出發,歷時3小時22分鐘到達武漢,總距離286公里。實驗中,無人車自主超車67次,途遇複雜天氣,部分路段有霧,在鹹寧還遭逢降雨。
紅旗HQ3全程由計算機系統控制車輛行駛速度和方向,系統設定的最高時速為110公里。在實驗過程中,實測的全程自主駕駛平均時速為87公里。國防科技大學方面透露,該車在特殊情況下進行人工干預的距離僅為2.24公里,僅占自主駕駛總里程的0.78%。
從20世紀80年代末開始,在賀漢根教授帶領下,2001年研製成功時速達76公里的無人車,2003年研製成功中國首台高速無人駕駛轎車,最高時速可達170公里;2006年研製的新一代無人駕駛紅旗HQ3,則在可靠性和小型化方面取得突破。此次紅旗HQ3無人車實驗成功創造了中國自主研製的無人車在複雜交通狀況下自主駕駛的新紀錄,這標誌著中國在該領域已經達到世界先進水平。
到2020年,駕駛員將不必再為汽車追尾而煩惱,“無人駕駛汽車將通過自身的雷達系統檢測與前車的距離,如果與前車距離過近,汽車將會自動剎車。”
到2030年,駕駛員基本上可以在較複雜路況下只控制方向盤或只踩油門和剎車了,因為半自動駕駛技術會在大多數車輛上得到套用,那時汽車會自動設定路線或自動進行油門和剎車的配合。
國家自然科學基金委員會稱,中國自主研發的無人駕駛汽車2013年將測試從北京行駛到天津,2015年將測試從北京行駛到深圳。
百度
2014年7月24日,記者從百度證實,百度已啟動無人駕駛汽車研發計畫。
根據規劃,該無人駕駛汽車可自動識別交通指示牌和行車信息,具備雷達、相機、全球衛星導航等電子設施,並安裝同步感測器。車主只要嚮導航系統輸入目的地,汽車即可自動行駛,前往目的地。在行駛過程中,汽車會通過感測設備上傳路況信息,在大量數據基礎上進行實時定位分析,從而判斷行駛方向和速度。
百度方面證實,百度已經將視覺、聽覺等識別技術套用在無人汽車系統研發中,負責該項目的是百度深度學習研究院。
2018年4月20日,美團和百度已經達成協定,計畫率先在雄安試驗無人駕駛送餐。百度員工表示,無人駕駛送餐可提升傳統送餐的安全性、人員分配,並節約成本,不過使用場景更偏向封閉性和限制性,比如新浪員工團購肯德基,就能用無人駕駛送餐。
清華
90年代初期清華大學開始研究無人駕駛車輛的相關技術。90年代後期, 清華大學研發的無人駕駛試驗平台THMR系列無人車問世。
2003年,清華大學研製成功THMR-V(Tsinghua Mobile Robot-V)型無人駕駛車輛,能在清晰車道線的結構化道路上完成巡線行駛,最高車速超過100km/h。
2008年,由中國工程院李德毅院士帶隊組成了清華大學智慧型車團隊,清華大學智慧型車團隊是隸屬於清華大學計算機科學與技術系人工智慧方向,共有老師、博士生等二十餘人。主要從事汽車無人駕駛的研發,具體涉及圖像識別、導航定位、車輛改造,人工智慧軟體算法等。目前已經多條開放道路無人駕駛實驗,無人駕駛行駛里程超過30萬公里,在國內人工智慧領域屬於頂尖水平,有較高知名度。清華大學智慧型車團隊多次參加[8]中國智慧型車未來挑戰賽,並取得第二、第三的優秀成績。
國外
美國谷歌版:無人駕駛汽車
該項目是塞巴斯蒂安-特龍(Sebastian Thrun)的智慧結晶,這位43歲的史丹福大學人工智慧實驗室的主任是谷歌工程師和谷歌街景地圖服務的創造者之一。
2005年,他領導一個由斯坦福學生和教師組成的團隊設計出了斯坦利機器人汽車,該車在由美國國防部高級研究計畫局(DARPA)舉辦的第二屆“挑戰”(Grand Challenge)大賽中奪冠,該車在沙漠中行駛超過132英里(212.43公里),因此贏得了由 五角大樓頒發的200萬美元獎金。而且,這一支由15位工程師組成的團隊繼續投身於此項目。另外,谷歌聘請了至少12人,並且這些人均沒有不良駕駛記錄,這部分員工坐在主駕座上以觀察汽車行駛狀況,他們每小時的薪酬為15美元或者更多。谷歌在此項目中使用了六輛普銳斯和一輛奧迪TT。
谷歌無人駕駛汽車已經行駛超過20萬英里。技術人員表示:谷歌無人駕駛汽車通過攝像機、雷達感測器和雷射測距儀來“看到”其他車輛,並使用詳細的地圖來進行導航。手動駕駛車輛收集來的信息是如此巨大,必須將這些信息進行處理轉換,谷歌數據中心將這一切變成了可能,它的數據處理能力是如此強大。所面臨的難題是自動駕駛汽車和人駕駛的汽車如何共處而不引起交通事故的問題。
2012年4月1日,Google決定聯合 NASCAR,將自己的無人駕駛汽車跟真正的賽車一起比試比試,證明機器人比人類駕車技術要高。不過在正式加入NASCAR之前,他們的無人駕駛汽車還需要經過各種檢測才能最終駛向NASCAR的賽道。
2014年5月28日Code Conference科技大會上,Google推出自己的新產品——無人駕駛汽車。和一般的汽車不同,Google無人駕駛汽車沒有方向盤和剎車。
Google的無人駕駛汽車還處於原型階段,不過即便如此,它依舊展示出了與眾不同的創新特性。和傳統汽車不同,Google無人駕駛汽車行駛時不需要人來操控,這意味著方向盤、油門、剎車等傳統汽車必不可少的配件,在Google無人駕駛汽車上通通看不到,軟體和感測器取代了它們。
不過Google聯合創始人謝爾蓋·布林(Sergey Brin)說,無人駕駛汽車還很初級,Google希望它可以儘可能地適應不同的使用場景,只要按一下按鈕,就能把用戶送到目的地。
《麻省理工科技評論》(MIT Technology Review)2014年8月發布的一份報告顯示,谷歌研發的無人駕駛汽車運行依賴地圖和詳細的數據,這一前提大大限制了他們的上路範圍。報告稱,谷歌無人駕駛汽車無法在99%的美國公路上自動行駛。
英國版:像外星飛船

一些人在 英國倫敦希斯羅機場親眼目睹了許多輛無人駕駛汽車“優爾特拉”(ULTra)自動駛離、抵達車站的奇妙場景。一輛輛車子魚貫而出,幾乎毫無噪音,一切都顯得井然有序。
這種汽車由英國的先進交通系統公司和 布里斯托大學聯合研製,並將於2010年投放希斯羅機場作為計程車運送旅客。這種汽車可能會讓阻塞交通、汽油味難聞、擁擠不堪的公共汽車變成一種過時的交通工具。這種超前的獨立艙沒有駕駛員、也沒有喋喋不休的談話聲伴隨你的旅途,只有一個裝在牆上的按鈕。按鈕旁邊寫著“開始”。該無人駕駛汽車有4個座位,形狀似氣泡,看起來就像一艘外星人飛船:這種汽車依靠電池產生動力,而且乘客可以通過觸控螢幕來選擇他們的目的地,它們的時速可達40千米,而且會自動沿著其狹長的道路系統行使。一旦乘客選擇好了目的地,控制系統會記錄下要求,並向艙車傳送一條信息。隨後艙車會遵循一條電子感測路徑前進。在旅程期間,如果需要的話,乘客可以按下一個按鈕和控制人員通話。
研究人員構想,到達希斯羅機場的乘客下飛機後,拿好行李並來到無人駕駛汽車的泊位。乘客使用智慧卡和汽車上的觸控螢幕選擇好目的地。只需等待10秒鐘,無人駕駛汽車就會帶乘客啟程。一路上汽車自動適時選擇剎車、變換速度,應對交通高峰和出現障礙物等情況。它會中途不停車把乘客送回家並停好車。乘客到家後,只需把車子停在那裡自行離開就好了。這種無人駕駛汽車要么就停在那裡,要么就會被控制中心調度到其他需要用車的地方。控制中心保證每一輛無人駕駛汽車沿著一條路線行駛,確保它們之間不會發生撞車。
英國 利茲大學運輸研究所的保羅·菲爾曼擔心這款汽車潛在的“非人性化”的影響。但是,他也相信,新款無人駕駛汽車的出現可能標誌著公共運輸新時代的到來。
英國第一輛無人駕駛汽車於2015年2月亮相,它是旨在幫助乘客,購物者和老年人短距離出行。新的無人駕駛汽車將於本周在英國格林威治亮相,被稱為Lutz Pathfinder。
Lutz Pathfinder道路測試將逐漸推廣到英國其他城市,Lutz Pathfinder可以運送兩個人及其行李,最遠行駛里程為40英里,速度每小時15英里。該計畫的支持者希望人們從普通汽車轉向無人駕駛交通工具,以減少污染和擁堵。
法國版:巡航飛彈技術
法國INRIA公司花費十年心血研製出“賽卡博”(Cycab)無人駕駛汽車,外形看起來像未來的 高爾夫球車。該車使用類似於給巡航飛彈制導的全球定位技術,通過觸控螢幕設定路線,“賽卡博”就能把你帶到想要去的地方了。只不過給“賽卡博”帶路的 全球定位系統要比普通的全球定位系統功能強大許多。普通 GPS系統的精度只能達到幾米,而“賽卡博”卻裝備了名為“實時運動GPS”的特殊GPS系統,其精良高達1厘米。這款無人駕駛汽車裝有充當“眼睛”的 雷射感測器.能夠避開前進道路上的障礙物,還裝有雙鏡頭的攝像頭,來按照路標行駛,人們甚至可以通過手機控嗣駕駛汽車,每一輛無人駕駛汽車都能通過網際網路來進行通信,這意味著這種無人駕駛汽車之間能夠做到信息共享,這樣多輛無人駕駛汽車能夠組成車隊,以很小的間隔順序行駛。該車也能通過交通網路獲取實對交通信息,防止交通阻塞的發生在行駛過程中,該車還會自動發出警告,提醒過往行人注意
德國版:像普通轎車
在德國漢堡的Ibeo公司套用先進的雷射感測技術把無人駕駛汽車變成了現實:這輛無人駕駛智慧型汽車在車身安裝了6台名為“路克斯”(LUX)的雷射感測器,由普通轎車改裝而成,可以在錯綜複雜的城市公路系統中無人駕駛。這歸功於車內安裝的無人駕駛設備,包括雷射攝像機、全球定位儀和智慧型計算機。
在行駛過程中,車內安裝的全球定位儀將隨時獲取汽車所在準確方位。隱藏在前燈和尾燈附近的雷射攝像機隨時探測汽車周圍180米內的道路狀況,並通過全球定位儀路面 導航系統構建三維道路模型。此外,它還能識別各種交通標誌,保證汽車在遵守交通規則的前提下安全行駛。安裝在汽車後備箱內的計算機將匯總、分析兩組數據,並根據結果向汽車傳達相應的行駛命令。
雷射掃描器能夠探測路標並提醒是否有車離開車道。在雷射掃描器的幫助下,無人汽車便可以實現自行駕駛:如果前方突然出現汽車,它會自動 剎車:如果路面暢通無阻,它會選擇加速;如果有行人進入車道,它也能緊急剎車。此外,它也會自行繞過停靠的其他車輛。
日本開發出車隊一體無人駕駛行車系統
日本新能源和產業技術綜合開發機構當天在一個試驗場展示了這一技術的套用,4輛卡車分別保持4米間距、以時速80公里的同一速度進行了試跑。每輛卡車上都安裝了自動駕駛系統,通過車輛間的通信,各輛車可以共享速度和剎車等信息,從而使得系統能夠同時控制多輛卡車。
谷歌
2014年12月21日,谷歌宣布,其首款成型的無人駕駛原型車製造完畢,將會在2015年正式進行路測。
此次推出的原型車外型上並無太大差別,只是細節上有一些變動,車頂上用於檢測路況的雷射掃描系統更加精細,新車還裝上了車燈。
要說最大的變化,那就是在測試階段,這輛無人駕駛車將再次裝上剎車踏板和油門,畢竟按照加州汽車管理局的規定,當自動駕駛汽車行駛在公共道路上時,必須有駕駛者在駕駛座上以便隨時接過汽車的控制權。
發展前景
國內無人駕駛產業發展前景如何?目前的高級輔助駕駛功能距離完全無人駕駛還有多遠?如何為無人駕駛創造上路測試的環境?哪些無人駕駛技術、產品最具有投資價值?
6月17日上午,“無人駕駛產業發展專家研討會”來自清華大學蘇州研究院、中國汽車工程研究院、寶馬汽車、奇點汽車、馭勢科技、北京中交慧聯、海博瑞德等十多家單位的二十餘位業內專家共同探討了中國無人駕駛產業的演進及投資價值。
未來五年國內市場規模超千億元
遇到危險時無需駕駛者操作就能自動剎車的主動防撞系統,已經成了2016年大眾帕薩特的新賣點。沃爾沃S60更是可以自己在高速上跟著堵車大隊挪動,解放了駕駛者的雙腳。
谷歌公司無人駕駛汽車取得的成果有目共睹,百度公司的無人駕駛汽車在去年年底也已首次實現國內城市、環路及高速道路混合路況下的全自動駕駛,長安汽車表示已圓滿完成2000公里無人駕駛測試項目,樂視更是推出無人駕駛汽車LeSEE……
目前,全球無人駕駛產業市場規模已突破300億元,美、德、日等國的無人駕駛產業正處於快速發展階段,相關的法律法規也在不斷完善。賽迪顧問汽車產業研究中心總經理汪家紅認為,無人駕駛已是汽車行業發展的必然趨勢,國內無人駕駛產業將進入加速發展階段,未來五年將形成千億元的市場規模。
實現完全無人駕駛分五步走
從各國明確的日程表來看,美國計畫2017年實現高速公路自動駕駛商業化,日本計畫在2018年實現,德國最遲將於2020年發售自動駕駛汽車。
綜合各權威組織的定義來看,實現完全無人駕駛需要經歷無自動化(L0)、駕駛輔助(L1)、部分自動化(L2)、有條件自動化(L3)和完全自動化(L4)五個階段。美、日、德公布的時間節點對應的正是有條件自動化(L3)階段。

儘管各國代表企業規模化普及的無人駕駛技術類型不盡相同,但美國通用、福特,德國大眾、寶馬、賓士,日本豐田、日產、本田等主流企業均處在L1~L2階段,即從駕駛輔助向部分自動化過渡的階段。從我國的一汽大眾、悅達起亞、東風雪鐵龍等代表企業來看,僅有極少數車型開始配置高級輔助駕駛功能,且以合資品牌為主。所以說我國無人駕駛產業還處在駕駛輔助功能普及階段,比已開發國家晚了一步。
加速發展仍需多方支持
與會專家認為,儘管我國無人駕駛產業起步較晚,但發展速度很快。在加速發展的過程中,主要挑戰來自技術、環境和政策三個方面。
核心技術方面,目前我國雷達技術還不夠完善,汽車電子控制匯流排CAN技術亟需掌握,智慧型網聯汽車也缺乏相關標準。環境方面,道路基礎設施規劃和建設的欠缺,導致智慧型駕駛難以實現。同時我國路況環境複雜,道路的適用性驗證難度很大。對比已開發國家來看,我國也缺乏適合無人駕駛測試的綜合路況試驗場。法律法規方面,已有的政策和條例更是束縛了無人駕駛的發展。
推廣普及
1.美國試點推進
谷歌是最有可能掃除當前所有短期障礙並將成千上萬輛無人駕駛車帶到公路的公司。谷歌公司有一個傳統:讓自己的員工率先去體驗公司研發的新科技和新產品,谷歌將之美名其曰:Eating your own dog food(吃你自家的狗糧)。

無人駕駛車已經獲得了加利福尼亞州立法獲批,谷歌可能會在該州部署數百輛無人駕駛車,用來接送公司員工上下班。據報導,谷歌汽車在試運行的過程中,到目前為止僅與其他社會車輛發生過兩次碰撞,其中一次是非常小的事故——完全在駕駛員的可控範圍內。
然後,谷歌可能會將無人駕駛車推向更多的地區,例如拉斯維加斯,因為除了加利福尼亞,內華達州也已經允許谷歌無人駕駛車上路行駛了。另外,有雄厚的資金做保證,谷歌接下來會給無人駕駛車建設一些必要的基礎設施,試圖將用戶的責任剝離出來,並且會在內華達市場以一個非常具有競爭力的價格推出無人駕駛車。
2.中國牌
儘管美國聯邦政府短期內不會讓無人駕駛汽車上路,其它國家對新技術的態度可能會更加開放。
中國可能會引入無人駕駛車,中國交通事故率是美國的兩倍多,而且汽車總量高速增長,車禍幾率可能進一步攀升。此外,中國人口密度高,無人汽車可以適應更窄的街道、取消紅綠燈和路燈以及降低能源消耗,為政府節省萬億元的開支。
而且,無人駕駛車也屬於中國政府重點支持7大行業之一,中國研究人員已經在該領域取得了長足的進步。如果引入並完善無人駕駛車的系統的話,還可以將這一系統出口到其他國家和地區。
3.風投介入
這種情況下,由創業型公司進入這個市場,開發大規模共享 無人駕駛交通系統。這種情況或許是3種情況中可能性最小的,但是這種操作方式的盈利模式已經出爐了。
這個團隊的領軍人物是前通用汽車研發部門副總裁,現任美國哥倫比亞大學地球研究所可持續發展計畫負責人勞倫斯·伯恩斯(Lawrence Burns)。這項計畫建立在專業的技術以及金融數據分析的基礎之上的,它可以提供3個可持續發展的市場準入策略。
這個團隊已經對美國密西根州安娜堡市做了詳盡的數據分析,結果顯示該市可以引進這種無人駕駛系統,因為可以為該地區的每一位車主節省90%個人開支,而且還可以帶給車主更好的駕車體驗。
此外,再以曼哈頓地區為研究案例,通過分析郊區以及人口密度較大的城區交通數據,共享的無人駕駛系統同樣可以為該地區提供巨大的資源節省空間以及更優質的服務。該計畫為創業公司提供了絕佳的商機。
“對首批進入該市場的創業公司而言,這是一個可以實現高利潤的商機。以安娜堡為例,假設某公司給無人駕駛車的個人移動服務的定價為每天7美元,那么刨去運營費用依然可以有5美元的利潤。如果安娜堡有10萬個市民(該市人口的三分之一)從這家公司訂購了這項服務的話,那么這家公司每天的淨利潤就可以達到50萬美元。
美國有2.4億人口,假設這家公司能夠分得1%的市場份額的話,那么這家創新型公司每年的淨利潤可以達到40億美元。這個盈利模式展示了伯恩斯主導這一商業計畫是如何在積極的風險管理下快速有效的變成現實的。
汽車測試
上路測試
2015年1月,英國將於開始允許無人駕駛汽車在公路上行駛。英國也將修訂道路交通規則,為無人駕駛汽車的出現提供適當的規則指引。
英國商務部長凱布爾日前宣布,英國將於2015年1月開始在至多三個試點城市測試無人駕駛汽車,並將考慮重新調整交通規則,為這種新型汽車“鋪路”。
無人駕駛汽車已經在許多國家投入使用,包括日本、瑞典以及美國。美國有四個州甚至已經通過了有關允許無人駕駛汽車上路的法律。
已有多個國家研發並測試了無人駕駛汽車。美國搜尋巨頭谷歌研發的無人駕駛汽車已經行駛超過30萬公里,中國的無人駕駛智慧型汽車於2012年完成了在京津高速公路上的測試,日本、德國、新加坡、瑞典等國也都對無人駕駛汽車進行了測試。
2017年5月,韓國政府相關部門已批准三星在韓國的公共道路上測試無人駕駛技術。
上路監控
英國監管部門要求上路的無人駕駛汽車必須有人監控,並且可以隨時切換到人工駕駛模式。無人駕駛汽車都配備GPS進行導航,另外還配備攝像頭和感測器,使車輛感知周圍的物體和其他行駛車輛,使其能夠應對障礙。
國際線上訊息:據中新社電,無人駕駛汽車將於2015年初在英國的4個城鎮試運行。英格蘭西南部城市布里斯托和中部城市考文垂將推出各自的無人駕駛汽車試行項目,倫敦郊區的兩個小鎮格林威治和米爾頓凱恩斯也將加入這項試驗。
試行項目
在英國財政部公布秋季財政報告後,英國半官方機構“創新英國”2014年12月4日宣布了承擔無人駕駛汽車試行項目的城鎮。在秋季財政報告中,英國財政大臣奧斯本承諾給這項計畫追加900萬英鎊的撥款。2014年7月,這個項目已經獲得1000萬英鎊的投資。
被選定的四座城市中,倫敦南部的格林威治和布里斯托將各自試驗一種自駕車項目,考文垂和米爾頓凱恩斯,將共同測試第三種自駕車。
英國政府宣布,四座城市的自駕車實驗,將從2015年開始啟動,政府將撥款900萬英鎊(約合1400萬美元),七月份,這一計畫已經首先獲得了1000萬英鎊的撥款。
在項目測試期間,所涉及的各家汽車公司還可以獲取更多資金幫助。
布里斯托市將測試“Venturer聯盟”的自駕車技術,這一計畫的主要目的,就是觀察自動駕駛汽車是否能夠減少城市交通擁堵,提高道路安全性。
這一聯盟的成員公司包括保險集團Axa,自駕車引發的一些保險問題也在關注範圍內。
載客運行
2018年5月31日,加州公共事務委員會出台了相關檔案,批准自動駕駛汽車在加州進行載客運行。根據加州公共事務委員會的檔案,在該州進行載客的運行的自動駕駛企業,需要獲得載客運輸的許可,也要獲得加州機動車輛管理局的測試許可。對於乘客,加州公共事務委員會在檔案中也給出了要求,必須超過18歲,而相關企業在進行自動駕駛汽車載客運行期間,也必須向乘客免費提供服務,不得向乘客收取費用。
各方態度
2014年12月,大多數英國民眾對無人駕駛汽車持保守態度。英國機械工程師協會今年上半年公布的一項調查結果顯示,56%的人明確表示不會購買無人駕駛汽車,願意購買的人只占20%,其餘人持觀望態度。
支持者
通用汽車和 卡內基梅隆大學(Carnegie Mellon University)的研究者正在合作開發無人駕駛車,並希望在2018年前投入市場。車輛無人駕駛技術的優點是使出行更安全(因為去除了人為失誤因素)、緩解交通壓力、並減少環境污染。
反對者
一些人喜歡駕車的人:有時候,駕駛會讓人感到輕鬆愜意,而且要讓人們願意託付性命,無人駕駛技術還得解決許多問題。駕駛員失誤也有其反面優勢,那就是人類的判斷能力。無人駕駛技術永遠是將保護車輛和車內人員作為第一要務。而一個駕駛員則可能寧願犧牲自己的車來保護他人。例如,您駕駛時前方有輛車突然打滑,而您已經來不及停車。此時,在您的左邊有一輛大卡車,右邊則是一群等著過馬路的孩子。大多數司機會選擇撞向大卡車,以避免撞到行人。而無人駕駛車輛無法識別孩子們——它只會簡單地看到右邊的阻力較少,而將車轉而沖向右邊。這是個極端的例子,但是類似的問題有待解決,只有這樣才能安心告訴車該往哪兒走,然後輕鬆享受無人駕駛之旅。
合作研發
2016年1月15日,美國政府發布無人駕駛汽車扶持計畫。

2016年3月24日,麻省理工學院研究人員已研發出一款新道路系統。未來,道路上將不再有交通燈,這意味著人們無需長時間等候,車輛尾氣排放也將減少。麻省理工學院可感知城市實驗室(MIT Senseable City Lab)發動了該項目,為自動駕駛車輛提出了“基於時段的交叉路口”概念,即為每輛汽車設定一個進入特定道路的時間。無人駕駛車公路系統問世 交通燈將成為過去式
2016年5月16日,百度宣布,與安徽省 蕪湖市聯手打造首個全無人車運營區域,這也是國內第一個無人車運營區域。2015年12月,百度無人車路測完成並成立自動駕駛事業部後,其負責人 王勁曾明確表示,百度無人車項目的目標是3年商用,5年量產。據悉,蕪湖之外,百度還將與全國十幾座城市達成無人車商用落地合作。
2017年7月18日,百度與微軟宣布,雙方達成了推進無人駕駛業務合作相關的協定。計畫在全球範圍內就無人駕駛加強技術研發和滲透等展開合作。
2017年10月18日,全球汽車廠商和科技公司已在自動駕駛領域投入了約800億美元。
榮譽記錄

出台檔案

2017年12月,北京市交通委聯合北京市公安交管局、北京市經濟信息委等部門,制定發布了《北京市關於加快推進自動駕駛車輛道路測試有關工作的指導意見(試行)》和《北京市自動駕駛車輛道路測試管理實施細則(試行)》兩個檔案,規範推動自動駕駛汽車的實際道路測試。
2018年4月12日,工信部發布《智慧型網聯汽車道路測試管理規範(試行)》,對測試主體、測試駕駛人、測試車輛等提出要求,明確省、市級政府相關主管部門可自主選擇測試路段、受理車輛申請和發放測試號牌。這意味著,“無人”駕駛汽車有望在更多實際道路測試。
汽車事件
2016年5月16日,百度宣布,與安徽省蕪湖市聯手打造首個全無人車運營區域,這也是國內第一個無人車運營區域。2015年12月,百度無人車路測完成並成立自動駕駛事業部後,其負責人王勁曾明確表示,百度無人車項目的目標是3年商用,5年量產。據悉,蕪湖之外,百度還將與全國十幾座城市達成無人車商用落地合作。

2018年3月19日晚上10時許,在美國亞利桑那州坦佩市,一位女子在人行橫道外行走時,被朝北行駛的Uber自動駕駛測試車輛撞到,女子被送往醫院後因傷勢過重身亡。事故發生後,當地警方、美國國家運輸安全委員會和美國國家高速公路交通管理局均開展調查,Uber迅速宣布暫停自動駕駛路測。
2018年4月18日,無人駕駛清潔車隊亮相上海市松江區,並在上海啟迪漕河涇(中山)科技園試運營。該車隊由一輛6米長的中型清潔車以及一輛3米長的小型清潔車組成,可自動啟動、自動清掃、自動通過紅綠燈、自動避開路邊障礙等。
