
簡介
 超級獵鷹
超級獵鷹“超級獵鷹”體型細長,前端是一個錐形的頭部,後端有一對水平尾翼,兩個巨大的尾部方向舵和一個雙人駕駛員座艙。此外,“超級獵鷹”最先進的部件就是它的水下機翼,它可以在水下實現和飛機原理一樣的飛行起降動作,可以在水中平緩、漸進地飛行。
與傳統潛水艇相比,“超級獵鷹”並沒有採用壓水艙技術,而是通過自身在機翼的頂部和底部之間產生一種壓力差,從而實現潛入水中。因為沒有了壓水艙,所以“超級獵鷹”質量更輕,速度更快,安全性也就當然隨之提高。一旦沒有了這種壓力差,那“超級獵鷹”也就自動浮出水面。
研發史
格拉漢姆·霍克斯20世紀60年代為英國特種部隊設計水下航行器,開始了其海洋探險裝置的研製生涯。在隨後20年間,他為海洋石油行業和科學研究機構設計潛艇。而且他所設計的潛艇還出現在多部電影中。
當第一艘“深海漫遊者(Deep Rover)”潛艇下水後,研製更好的潛艇的念頭一直縈繞在霍克斯心頭。儘管當時航空技術飛速發展,人類已經可以生產超音速飛機,但是水下航行器的研製卻進展緩慢。潛水裝置仿佛熱氣球一般,在水下像水母一樣速度緩慢。霍克斯希望探索出高效的水下航行技術,並能研製出一種個人更容易得到的潛艇,比如遊客、執法人員和海洋生物學家。霍克斯認為,要想在水下高速航行,潛艇必須長上“翅膀”。因此,霍克斯成立了霍克斯海洋技術公司,潛心研製帶翼的“深海飛行”系列潛艇。
“超級獵鷹”是“深海飛行”系列的第四艘,其設計研製緣起於當代史上最雄心勃勃的水下探險計畫。2005年,他開始為計畫造訪馬里亞納海溝的探險家斯蒂文·福賽特建造一艘重達8000磅的深海潛艇——“挑戰者”號(Challenger Deep)。在福賽特2007年駕機在內華達州沙漠發生空難後,霍克斯停止建造“挑戰者”號(福賽特的遺孀現在擁有原始機器),並將他的注意力轉向“超級獵鷹”號。
工作原理
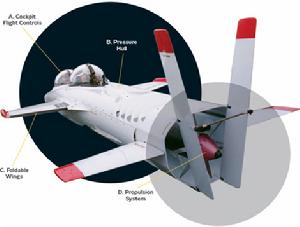 “超級獵鷹”結構圖
“超級獵鷹”結構圖“超級獵鷹”可以下潛到1500英尺的深度,在海底行駛的速度最快可達6節,比常規的潛水器快多了。這艘潛艇擁有一個碳纖維抗壓艇體,裡面有兩個駕駛艙和飛行員都熟悉的儀錶盤,可以進行雙飛行控制。它可以以每分鐘200英尺的速度下潛,上浮的幅度可以達到下潛的兩倍,為每分鐘400英尺。霍克斯據說是根據在空氣里飛行的同樣的原理設計潛水器的第一人,他利用機翼上的向下的“升力”,從而使潛艇向深處下潛。
由於減少了潛艇內部抗壓殼的體積,所以,它的重量只有傳統下潛罐的十分之一。該潛艇由一套鋰聚合物電池提供動力,一個常規的潛水器可以在水下連續工作三到五個小時,而“超級獵鷹”則可以連續工作24個小時。在這個潛艇的全體船員或者乘客不會遭受所謂的潛函病或其他與壓力變化有關的疾病,因為它的壓力一直保持在一個恆定的數值。如果發生事故,這個4000磅重的潛艇失去動力,它就會自動上浮到水面。它的造價高達150萬美元,研製者說這大概和一架輕型飛機的價格相當。
不良因素
 “超級獵鷹”潛艇利用倒置的雙翼像飛機在空中飛行一樣在水中穿行
“超級獵鷹”潛艇利用倒置的雙翼像飛機在空中飛行一樣在水中穿行霍克斯認為他還有一項任務,那就是把他的“超級獵鷹”變成海上的大使。他說:“我們生活在一個藍色星球上。地球這個名字是不恰當的。我們通過各種航飛行器了解了藍天,我們通過各種航天飛行器了解了近太空。我們也需要掌握水下飛行器,因為大海是一個三維空間。它不僅很深,還很長。所以這個機器不僅能夠下潛而且能夠跟著鯨魚跑,做翻滾動作,像目前的海洋生物一樣,在這之前從來沒有出現過。”
這個任務要成功,最關鍵的是把霍克斯描述的不良因素降到最小。他解釋說,這就意味著該潛艇擴散壞處,也就要滿足下列條件:低噪音信號,低電磁信號,低電子信號和低光信號。在霍克斯看來,最後一點尤其重要,因為有很多海洋生物對光很敏感,經常有海洋生物從潛艇邊上急匆匆的逃離,因為艇上發射了太強的光。
霍克斯說:“我們知道的例子,鯊魚對漏電是很敏感的,所以你放一個上千伏的電壓在那裡,就等於在動物們逃跑的路上放置了一個水下核反應堆。如果每個人都占據你的路線,你想在這樣的空間裡飛起來是不可能的。”
試航
2009年11月,“超級獵鷹”在首次試航中,為了躲避水中的障礙物,“超級獵鷹”幾乎以垂直的角度潛入了水中並實施了一次90度翻轉的表演,結果表演造成螺旋槳和方向舵損壞。霍克斯表示,“我們這樣做也是為了能夠發現其中的缺陷。”於是,霍克斯用一種金屬方向舵來代替目前的塑膠製品。“超級獵鷹”修復工作完成後,當“超級獵鷹”潛入水下後,整個外部世界陷入了一片寂靜。
“超級獵鷹”的內部空間比較緊湊,但是足夠舒服。座位是斜躺式的,試航者的雙腿跨在一個二氧化碳處理裝置上。他的右肩上方有一個氧氣控制按鈕,同二氧化碳處理裝置一起保證艙內空氣適合呼吸。艙內兩個駕駛位都有全套操縱裝置,油門在左邊,右手處有遙控操縱桿。但是處於前駕駛位的霍克斯是主控。在霍克斯的控制下,她們開始下潛,漸漸被昏暗的墨綠色水籠罩。遠離海面上的波浪和船隻,海水下的世界非常靜謐,一時間感覺好像潛艇一動不動浮在水中。
