
基本結構
撓性陀螺儀主要由陀螺轉子、撓性接頭、驅動電機、信號器和力矩器五大部分組成。
陀螺轉子為外緣向下延伸成環形凹槽的圓盤;撓性接頭一般採用整體式動力調諧式撓性接頭;驅動電機是一個磁滯馬達,其轉軸便是轉子的自轉軸;信號器由對稱安裝、反向串聯的兩個線圈及有關磁路組成;力矩器用來沿兩進動軸對轉子施加修正力矩或補償力矩。
基本原理
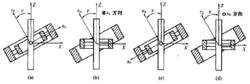
撓性陀螺儀在工程上較多採用單平衡環撓性轉子動力調諧陀螺儀,其撓性接頭配置如下圖所示。
 撓性陀螺儀
撓性陀螺儀撓性接頭由相互垂直的內外撓性軸和一個平衡環構成,內撓性軸由一對內扭桿組成,外撓性軸由一對外扭桿組成,內撓性軸將驅動軸與平衡環相連線,外撓性軸將平衡環與轉子相連。
內撓性軸線垂直於驅動軸線,外撓性軸線垂直於內撓性軸線,並與驅動軸交於一點。正常工作時,驅動電機高速旋轉,通過內撓性軸帶動平衡環轉動,平衡環再通過外撓性軸帶動陀螺轉子旋轉。
在無干擾的情況下,撓性陀螺儀的自轉軸與驅動軸在同一條軸線上;在受到干擾力矩或殼體轉動時,自轉軸和驅動軸便不在同一軸線上。
 撓性陀螺儀
撓性陀螺儀 撓性陀螺儀
撓性陀螺儀驅動軸與自轉軸(平衡環)之間的運動關係如下圖所示。其中XYZ為與殼體固連的坐標系,Z軸為驅動方向;為與轉子固連的坐標系,為自轉軸方向。
 撓性陀螺儀
撓性陀螺儀動力調諧撓性陀螺儀的運動方程為:
 撓性陀螺儀
撓性陀螺儀 撓性陀螺儀
撓性陀螺儀 撓性陀螺儀
撓性陀螺儀 撓性陀螺儀
撓性陀螺儀 撓性陀螺儀
撓性陀螺儀 撓性陀螺儀
撓性陀螺儀 撓性陀螺儀
撓性陀螺儀 撓性陀螺儀
撓性陀螺儀 撓性陀螺儀
撓性陀螺儀其中為轉子相對x軸的轉角,為轉子相對y軸的轉角,為有效的轉子徑向轉動慣量,J為有效的轉子軸向轉動慣量,為轉子相對旋轉軸角速度,為撓性支承彈性係數,為支承正交彈性係數,為相對x軸作用在轉子上的力矩,為相對y軸作用在轉子上的力矩。
撓性陀螺儀 撓性陀螺儀
撓性陀螺儀當對撓性陀螺儀實現調諧時,約等於0,且剩餘的正交彈性係數項的影響和f項的影響均可忽略,由此得到自由轉子陀螺儀方程(其中):
 撓性陀螺儀
撓性陀螺儀進一步可得到進動方程為:
 撓性陀螺儀
撓性陀螺儀特點
(1)體積小、結構簡單、重量輕、成本較低
(2)可靠性高
(3)工作準備時間短
(4)消除了摩擦等干擾因素的影響
(5)能夠承受的衝擊和加速度有限,穩定性不夠,壽命有限
