
裝置介紹
基本類型
用途
使載體在受到外界衝擊時仍然能夠保持相對穩定的狀態。載體可以是飛機、人造衛星等大型設備,近年來也將陀螺穩定器小型化、民用化,運用於小型無人機、攝影器材等。
由於被穩定的對象(例如人造衛星)的質量往往較大,陀螺產生的陀螺力矩只能在相對短時間內起穩定作用。在航空航天使用的條件下,事實上往往達不到長時間穩定的要求。
工作原理
多軸的陀螺穩定器的原理與單軸陀螺穩定器的原理類似,這裡僅對單軸陀螺穩定器原理進行說明。
 陀螺穩定器陀螺儀
陀螺穩定器陀螺儀 陀螺穩定器陀螺儀
陀螺穩定器陀螺儀 陀螺穩定器陀螺儀
陀螺穩定器陀螺儀 陀螺穩定器陀螺儀
陀螺穩定器陀螺儀 陀螺穩定器陀螺儀 陀螺穩定器陀螺儀 陀螺穩定器陀螺儀
陀螺穩定器陀螺儀 陀螺穩定器陀螺儀 陀螺穩定器陀螺儀 陀螺穩定器陀螺儀
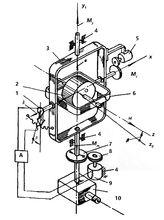
陀螺穩定器陀螺儀如圖是一個單軸的動力陀螺穩定器,裝置10為被穩定對象。起始時裝置10的主軸與陀螺轉子軸平行,當基座繞外環軸轉動時,轉子軸和裝置主軸由於陀螺的定軸性不隨之轉動,保持原有方向;當基座受到衝擊時,轉子軸與主軸做章動,仍處於原有方向附近。如果在外環軸上作用一個干擾力矩,轉子與內環一起繞內環軸進動,進動的角速度為。在外力矩作用在外環軸時,轉子繞內環軸做進動產生的陀螺力矩通過傳動裝置5也作用在外環軸上,並且二者大小相等方向相反,這樣使得裝置主軸仍處於起始位置。
以上就是陀螺穩定器的基本工作原理。在此基礎上再增加一個自由度,一套控制迴路系統,就可以變成二軸穩定平台。如果再增加,就成為三軸穩定平台或空間穩定平台。
自動控制迴路
為了提高陀螺穩定器的性能,常常設計的有自動控制迴路,這些控制迴路分為 穩定迴路和 修正迴路,均採用負反饋調節機制。
例如在上圖(單軸動力陀螺穩定器)中,減速器電機4為穩定迴路,其作用是提供陀螺進動的阻尼力矩,可以使陀螺發生進動時更快地靜止下來;電機5構成修正迴路,與外框架固定在一起,為提高穩定精度,修正迴路產生與摩擦力大小相等方向相反的力矩,以補償摩擦力對裝置的影響。
在各種穩定系統中,穩定迴路的設計歷來是非常重要的,往往也是複雜的,根據反饋迴路的控制原理,可以將穩定器為 積分陀螺組成的穩定器和 微分陀螺組成的穩定器。
提升性能措施
 陀螺穩定器陀螺儀
陀螺穩定器陀螺儀為了提高陀螺穩定器的精度,增大陀螺角動量通常不可取,因為增大角動量需要增大整個裝置的尺寸和重量。實際採用的方法是減小進動軸上的干擾力。因此,現多採用小型單自由度液浮積分陀螺、微分陀螺和撓性陀螺構成穩定器。這些陀螺的角動量很小,所產生的陀螺力矩對穩定迴路來說基本沒有影響,因此這種陀螺穩定器也不是嚴格的“動力陀螺”,陀螺在這裡只起感測器或控制器的作用,它們感應角速度信號,然後由其他裝置按照設計的規則姿態控制載體姿態。
套用實例
空間飛行器的穩定
空間飛行器的穩定系統可分為被動式和主動式兩種。
作用於空間飛行器的力矩是穩定系統中的陀螺所產生的,用來平滑干擾力矩,且不採用任何工體(或者燃料),這種穩定系統被稱為被動式的。在這裡,陀螺除了起穩定作用外,同時又是空間飛行器偏離要求的給定方位的敏感器件。
主動式空間飛行器的穩定系統是藉助於機載陀螺來控制機電、流體等傳動裝置來實現穩定,要求消耗工體。
