
發展背景
靜電陀螺儀是一種球形轉子自由陀螺儀,它的基本概念是在美國大力發展戰略核潛艇的時代,由伊利諾斯大學諾爾西克教授於1954年向美國海軍研究辦公室提出來的。他提出的方案是赤道上帶土星環的空心球轉子框架式靜電陀螺儀.它對轉子式不施矩的。因此出了漂移外,轉子主軸和殼體對應的軸將在慣性空間保持形同的姿態。這實質上是一種二自由度框架式陀螺儀.後來經過研究改為現在的球形轉子自由陀螺儀。
1955年美國海軍正式立項開始研究,Honeywell公司、GeneralElectric公司以及Arma公司很快也加入了該項目。Rockwell跨國公司的Autonetics分公司是1959年開始研究的.在早期的研究中,只有Honeywell公司和Autonetics分公司的工作最後實現了導航產品。
在這中間,美國靜電陀螺儀研究經歷的曲折的發展道路。在20世紀50~60年代,液浮陀螺導航系統占據了艦船慣性導航系統的統治地位。靜電陀螺儀項目當時並未被海軍選用,因此在這期間,Honeywell公司和Autonetics分公司都致力於開發全姿態輸出靜電陀螺儀,研發捷聯式靜電陀螺儀導航系統,企圖套用於航空和航天領域,但始終未成為裝備 。
工作原理
圖1介紹靜電支承系統的工作原理。球形轉子安裝在支承電極的球腔之中。圖上只畫出一路,實際上同樣的系統共有三路。整個電極球腔分割為12塊等面積的電極。當轉子偏離電極中心時,在相應的兩塊電極上將同時接通正和負等幅度的控制電壓,使轉子回到電極中心位置,同時轉子始終處在地電位,從而解除了三路支承之間的藕合關係。
 圖1.靜電支承系統的工作原理
圖1.靜電支承系統的工作原理轉子的姿態角通過光電信號器轉換為電信號。圖2為轉子表面上刻線的情況。在轉子極點的一側刻有矩形圖線,當轉子的極點偏離頂端光電信號器時,將有轉子自轉頻率的正弦波信號輸出,其幅度和偏角的大小成正比。側面刻線由側面光電信號器觀測,產生脈衝信號,作為檢相器參考方波的相位基準。經過上述信號變換,靜電陀螺儀將給出兩路直流信號,成為一個二自由度的位置陀螺儀。
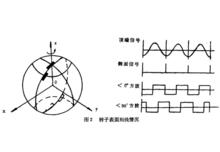 圖2.轉子表現刻線情況
圖2.轉子表現刻線情況靜電陀螺儀具有加轉和阻尼線圈。在陀螺啟動之後,這些線圈不再接入加轉和阻尼電流,而是作為加矩線圈使用。如圖3所示,如果把頂端和側面的光電信號送入加矩控制線路,則可以把陀螺轉子鎖定在頂端光電信號器的零位上。這時靜電陀螺儀成為一個二自由度的速度陀螺儀。加矩線路還可量測和補償陀螺的漂移。
綜上所述,靜電陀螺儀具有支承系統,光電信號器和磁場力矩器等三個主要部件。此外為了保證正常工作,還需要有真空維持,溫度控制和外磁場禁止等裝置 。
國內外研究成果
國外研究成果
國外研製靜電陀螺儀的只有美、蘇、法三個國家。在文獻中,對美國的研製過程和產品水平報導較多,可以代表目前國外的技術水平。蘇聯和法國也有不少研究報告發表,但是沒有關於產品及精度的報導。
在美國,靜電陀螺儀是在1954年提出研製的,由美國海軍科研局(ONR,OfficeofNavalReseareh)資助,目的是用於核潛艇的慣性導航。經過原理樣機研製階段,到60年代初開始轉入型號產品的研製,主要由RoekwellInternational公司的Autoneu一tios分部和Honeywen公司兩個廠家承擔,分別研製實心轉子和空心轉子的靜電陀螺儀。
實心轉子靜電陀螺儀是在1964年開始研製的,被轉子的直徑為10毫米,採用轉子質量不平衡的方法來建立陀螺儀的信號器。1967年這種陀螺儀被用來建立捷聯式飛機慣性系統,型號先後有N57,N73和N73H等,但未被空軍採用。
1969年該公司把這種陀螺儀組成平台式慣性系統。1974年美國海軍根據長時間試驗的優異結果決定在三叉戟級核潛艇上採用,型號為ESGM(靜電陀螺監控器),首批生產了14套。ESGM作為潛艇內部的定位基準,用於修正液浮陀螺船用慣性系統,使得潛艇需要獲得外部定位信號的時間間隔由原來的4天延長到40天以上。這種ESGM/s工Ns組合式導航系統顯著地提高了核潛艇的隱蔽性,因而在核潛艇,包括攻擊型核潛艇中,普遍得到套用。
空心轉子的靜電陀螺儀是Honeywel公司在1962年開始研製的。1967年研製成功平台式飛機慣性系統,型號為AN/AS一130,AN/ASN一136等,目前統稱為GEANS型。這種陀螺儀採用直徑為38毫米的空心被轉子和光電信號器。這種慣性系統早期的精度為0.15海里/小時,被美國空軍選用於B一52H、B一1等型號的飛機,稱為標準精密導航儀(SPN),已生產800套以上。1983年試飛的結果表明,這種慣性系統在12小時連續飛行中,定位誤差僅為48米,相當於0.02海里/小時。這是目前精度最高的飛機慣性導航系統。據該公司介紹,空心轉子靜電陀螺儀與g無關的漂移誤差小於0.0002度/小時;與g和92有關的漂移誤差係數分別小於0.。。02度/小時/g和0.0002度/小時/g平方。由於靜電陀螺儀與加速度有關的漂移誤差係數非常小,在飛機等加速度和振動干擾較大的載體上,採用靜電陀螺儀可以顯著地減小機動飛行造成的慣性系統誤差。這是GEANS被美國空軍選用的原因之一。
70年代中期,人們開始把慣性系統用於大地測量。美國國防測繪局(DMA,De一fenseMappingAgency)選擇GEANS系統作為大地測量和地球重力場測量的儀器。在軟體作相應的改造之後,這種系統的型號稱為GEO一SPIN,意思是大地測量用的標準精密慣性導航儀。根據1953年Honeywell公司的介紹,這種系統在30一60公里的測線上,定位誤差僅25~50厘米,相當於一等測量控制點的精度,。西德等國的軍事部門曾採用GEO一SPIN系統進行山區重力場的測量,重力異常值測量精度為3毫伽,垂線偏差角的測量誤差小於1角秒。這種系統是目前唯一可以同時定位和測量重力的儀器。尤其可貴的是,在GEO一SPIN中靜電陀螺儀租撓性加速度計的誤差係數只需要每年校準一次。這充分表現出靜電陀螺儀誤差的長時間穩定性。
靜電陀螺儀的弱點是承載能力受到電場擊穿場強的限制,通常小於30g。由於轉子加轉過程中將受熱,一般靜電陀螺儀選擇工作溫度稍高,並要求較嚴格的溫度控制。此外陀螺啟動時不可避免地會產生章動,需要一定的時間加以阻尼。這些特點使得靜電陀螺儀不宜用於戰術武器,應當用於高精度長時間工作的場合 。
國內研究成果
1965年我國確定研製靜電陀螺儀,由清華大學等單位承擔。1965~1971年原理樣機研製成功,1971一1980年轉入套用研究階段,並在1976年研製成功靜電陀螺三軸穩定平台,在飛機上進行了13次飛行試驗。在海洋重力儀穩定平台,浪高儀平台等多種產品中,靜電陀螺儀得到了海上試驗的考核,證明靜電陀螺儀完全可以滿足飛機和船舶的環境條件。1985年靜電陀螺儀通過了部級技術鑑定,長時間工作的精度達到了相當高的水平,並有較大的潛力 。
未來發展展望
靜電陀螺儀是目前精度最高的陀螺儀,而且適用於長時間工作的環境,因而在核潛艇和遠程飛機上已經得到普遍套用。
美國Stafnord大學在NASA的支持下目前正在研製衛星上用的靜電陀螺儀,準備在1990年把載有4隻實心石英轉子的靜電陀螺儀裝入衛星送入軌道,整個計畫稱為“GP-B”計畫(意指重力試驗計畫),目的是量測廣義相對論效應下陀螺儀的進動。由於這種進動速度的理淪計算值非常小:
(1)在衛星軌道平面內為6.9角秒/年;
(2)在地球赤進平面內為0.044角秒/年。這種靜電陀螺儀的漂移誤差應當小於0.3x10^(-6)角秒/年,相當於3X10^(-11)度/小時。
Stanford大學的GP一B計畫1985年得到了NASA的巨額經費,並與Lockheed飛彈公司合作。應當指出,他們所研製的靜電陀螺儀將來可以用在衛星和航天飛行器上,作為慣性坐標系的基準。聯繫到美國正在大力開展星球大戰計畫,重視這一項目看來不僅是為了研究廣義相劉浦侖效應的實驗 。
