
種類
微特電機門類繁多,大體可分為 直流電動機、 交流電動機、自態角電機、 步進電動機、 鏇轉變壓器、 軸角編碼器、 交直流兩用電動機、 測速發電機、 感應同步器、直線電機、 壓電電動機、電機機組、其他 特種電機等13大類。
結構
電磁式
 微特電機零件
微特電機零件微特電機在結構上大體可分為3類 :
基本組成與普通電機相似,包括定子、轉子、電樞繞組、電刷等部件,但結構格外緊湊。
組合式
常見的有兩種:上述各種微電機的組合;微電機與電子線路的組合。例如直流電動機與感測器的組合,X方向與Y方向直線電動機的組合等。
非電磁式
外形結構與電磁式一樣,如鏇轉類產品作成圓柱形,直線類產品作成方形,但內部結構因其工作原理不同而差別很大。
參數性能
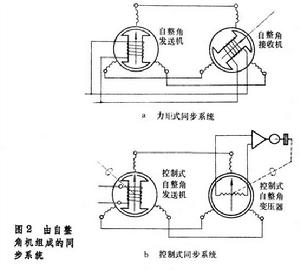
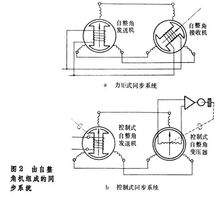 由自整角機組成的同步系統
由自整角機組成的同步系統各類微特電機的性能差別很大,其性能參數難以統一闡明。
一般說來,用於驅動機械的側重於運行及起動時的力能指標;作電源用的要考慮輸出功率、波形和穩定性;控制用微電機則偏重於靜態和動態的特性參數。
前兩類電機的特性參數與普通電機相似。
特性參數
工作特性
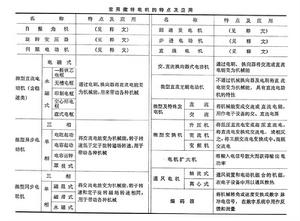
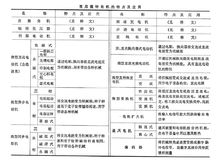 常用微特電機的特點和套用
常用微特電機的特點和套用控制用微電機有其獨特的特性參數。
常用輸出量與輸入量,或一個輸出量與另一個輸出量之間的關係來表示。從控制要求來說,靜態特性曲線應連續、光滑,沒有突變;動態特性常用頻率曲線或回響曲線來表示。頻率曲線應平穩,無突跳振盪點;回響曲線應快速收斂。
靈敏度
對應於單位輸入信號的輸出量的大小。一般常用比力矩、比電動勢、放大係數等表示。
精度
一定輸入條件下,輸出信號的實際值與理論值的差值代表微電機的精度,常用誤差大小表示。
阻抗或電阻
在系統中,微電機的輸入、輸出阻抗應分別與相應電路匹配,保證系統的運行性能及精度。⑤可靠性。不僅是控制用微電機的特殊要求,驅動微電機和電源微電機也有此要求。常用使用壽命、失效率、可靠度和平均無故障時間等參數表征微電機的運行可靠性。
適用範圍
運動機械
無特殊控制要求的驅動場合作為運動機械負載的動力源;
音像設備
例如,在盒式錄像機中,微特電機既是 磁鼓組件的關鍵元件,又是其主導軸驅動、收供帶和磁帶盒的自動裝載以及磁帶 張力控制的重要元件。
自動化設備
辦公自動化設備、計算機外部設備和 工業自動化設備。如磁碟驅動器、 複印機、 數控工具機、機器人等都套用了微特電機。
分類
微特電機的種類繁多。表中列有常用的微特電機的特點和用途。圖1為各種微特電機的外形。
 微特電機
微特電機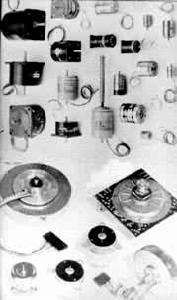 微特電機
微特電機電感式角位移感測元件,用作傳遞或檢測若干個機械上獨立的轉角,又稱自同步機。
自整角機和線繞式異步電機相似,轉子轉動時繞組間的耦合程度發生變化,感生出信號或產生力矩。由於自整角機要求高精度、高可靠及動態特性好,因而必需選用優質材料,進行精密加工。
自整角機可分為力矩式、控制式和差動式三類。按功能又分為傳送和接收兩種。自整角傳送機輸出與輸入轉角對應的電信號,它既可是力矩式又可是控制式。自整角接收機接收電信號後,輸出相應的轉角或電信號。輸出轉角的稱為力矩式自整角接收機,組成力矩式同步系統;輸出電信號的稱為控制式自整角變壓器,組成控制式同步系統(圖2)。當要求完成兩個角度的和或差的傳遞和檢測時,則應採用差動式自整角機。
 微特電機
微特電機和自整角機相似的元件,但只能輸出電信號。信號的幅值與轉子轉角成正弦、餘弦、線性或特種函式關係。此外,還有電感式電位器和電感式移相器,前者的功能與普通電位器類似,後者輸出的幅值恆定,而相位與轉角成正比。
為了提高系統精度,往往將鏇轉變壓器或自整角機組成粗精兩個(或多個)通道的雙速(或多速)系統,有機械和電氣兩種型式。前者用兩對精度等級相同的電機分別組成粗精通道,其間用機械升速方法聯結;後者則分別採用兩對電機用電氣方法升速。粗機一般為二極式結構,精機則是多極式。極對數越多,精度越高。現代,最多的極對數為128,元件精度可達2角秒。感應同步器是特殊結構的多極元件,極對數更多,精度更高,但輸出信號卻很小。
伺服電動機在系統中作為執行元件,又稱執行電動機,分交流和直流兩類。
交流伺服電動機是一種特殊的二相異步電動機。定子上有正交的兩相繞組,一相接到激磁電源,另一相輸入控制信號。轉子有鼠籠式、非磁性空心杯或磁性杯等形式。一有控制信號作用,轉子立即轉動,其轉速正比於信號的大小。一旦信號除去,轉子立即停轉。
直流伺服電動機多半用永磁定子激磁,控制信號加在電樞上。電樞繞組除一般鐵芯繞組外,還有印製、空心杯、盤式等無鐵芯繞組和無槽電樞繞組,用以改善動態和靜態特性。此外,還可用電子電路取代機械換向器,構成無刷直流電動機。
測速發電機輸出與轉速成正比的器件,又稱速度感測器,有交、直流兩種。直流測速發電機的結構和直流伺服電動機相近,具有較高精度。交流測速發電機大多用空心杯轉子;定子為兩相,一相激磁,另一相輸出頻率不變的交流電壓。
多極形式的伺服電動機和測速發電機分別稱為力矩電動機和低速測速發電機。它們一般用來輸出低速大轉矩,直接帶動機械負載,並可在鏇轉狀態下長期工作。最大轉矩已高達1400千克米;最低轉速低到每天一轉以下,電機外徑達26米。
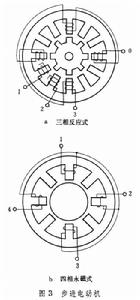
步進電動機用脈衝信號控制轉子轉動的電動機,也稱脈衝電動機。常見的有反應式和永磁式兩種。圖 3是三相反應式步進電動機及四相永磁式步進電動機的原理圖。每加一個控制脈衝信號,定子繞組的通電狀態改變一次(圖中繞組1通電改為繞組2通電),轉子就轉過一個步矩角。反應式和永磁式兩者的運行性能不同,相對說來,後者的步矩角大,有定位轉矩,運行頻率低,阻尼性能好,功耗小等特點。感應子式步進電動機兼有反應式和永磁式的特點,即步矩角較小、運行頻率較高,有定位轉矩,阻尼性能好等。
 微特電機
微特電機步進電動機適用於數字控制系統,可以構成簡單的開環系統,有較高的定位精度,而且結構簡單、運行可靠、成本較低,因而套用很廣。它的缺點是起動轉矩較小,帶動慣性負載的能力較差。
直線電機在許多場合下要求負載作直線運動,若仍用鏇轉式電機,則傳動機構複雜、性能差,因此需用直線電機直接帶動。直線電機在電子設備中用得很多。按其功能有電動機和感測器兩類,而後者又分速度感測器和位移感測器兩種。
直線電動機按功能分有控制用和帶動機械用兩種。直線步進電動機和直線直流電動機套用較多。在結構上它們相當於將鏇轉電機沿電樞周圍展開成直線;用於磁碟驅動的音圈式直線電機的結構則和揚聲器相似。通過定子和動子的電磁作用,沿直線方向產生推力,由此帶動機械或控制負載的運動。
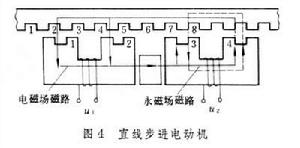
兩個直線步進電動機合在一起便構成平面步進電動機,可以得到二維運動。圖4為平面永磁式步進電動機中一個方向的電機示意圖。直線速度感測器又稱直線測速發電機,用來檢測直線運動速度。通常,其動子用永磁體,輸出電信號的線圈置於定子上。
 微特電機
微特電機直線位移感測器可以利用差動式變壓器原理實現信號的輸出,也可類似正、餘弦鏇轉變壓器,做成直線感應同步器。
具體套用
為了使用方便,往往將上述兩個或兩個以上的元件機械地組合成機組。一般有機械和電磁兩種組合形式。如伺服-測速機組、力矩-自整角機組等,是在同一機殼內的公用轉軸上機械地組裝成一體;而電磁組合形式則是兩個電機共用同一個磁路的結構。
參考書目
上海微電機研究所編著:《微特電機》,上海科學技術出版社,上海,1983。
S.A.Davis and B.K.Ledgerwood, Electromechanical Components for Servomechanisms, McGraw-Hill, New York,1961.
